Um auch saugdichte, poröse oder biegeschlaffe Bauteile mit Leichtbau- und kleinen Industrierobotern sicher handhaben zu können, bietet Schmalz den neuen pneumatischen Vakuum-Erzeuger RECB an.
Bei Leichtbau- und Industrierobotern ist der Roboterarm eine wichtige Komponente. Noch wichtiger ist jedoch die Schnittstelle zwischen Roboterarm und Werkstück, also Greifer, Sensoren oder Werkzeugwechsler. Denn diese Komponenten sind dafür verantwortlich, Werkstücke und Produkte sicher zu handhaben. Das kann zur Herausforderung werden – zum Beispiel, wenn die Gegenstände porös sind wie Kartonverpackungen, oder wenn sie Unebenheiten aufweisen. Schwierig kann es auch bei biegeschlaffen Gegenständen wie befüllten Kartons in Palettier- und Depalettierprozessen sein.
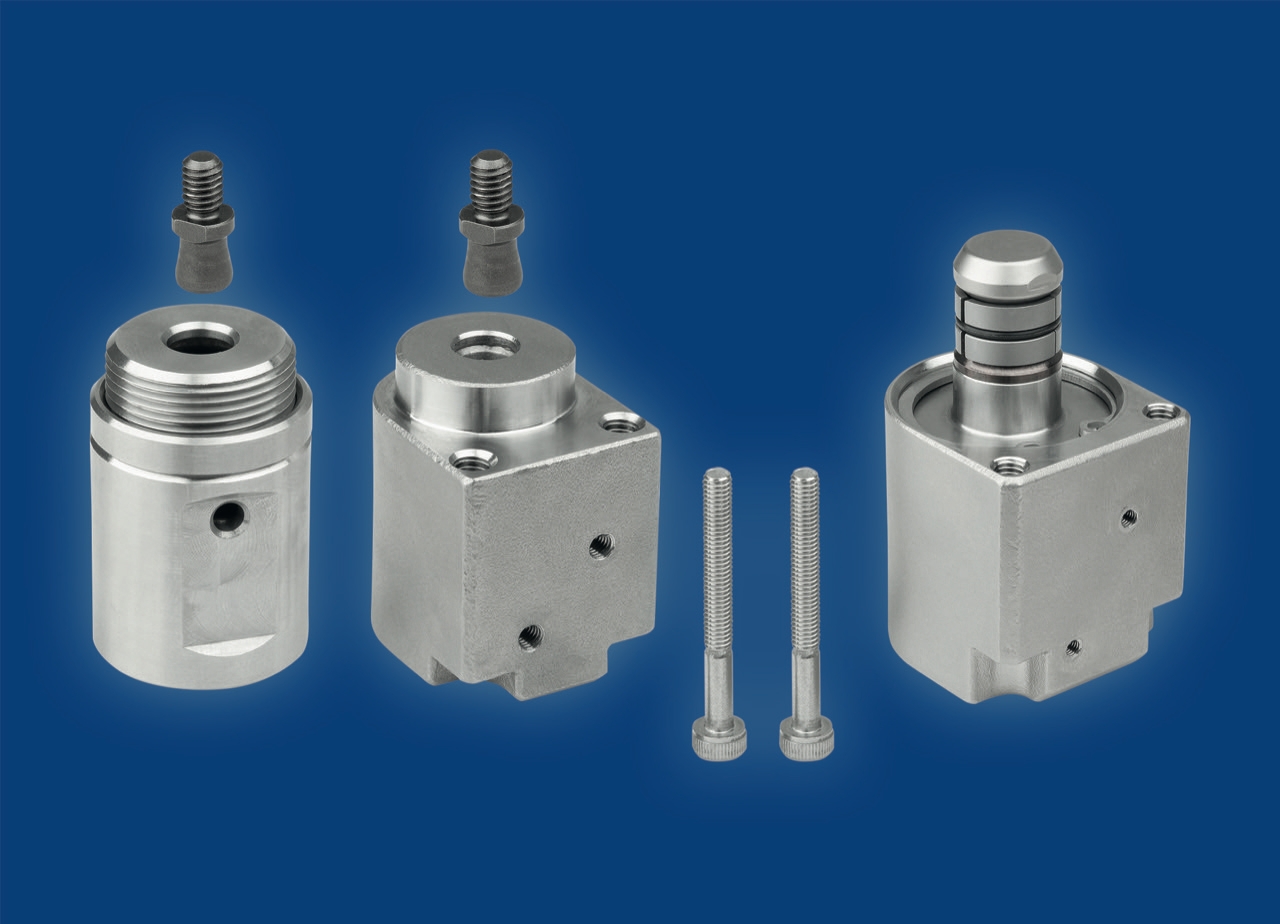
Hier wird das Vakuum rein pneumatisch erzeugt
Genau für solche Anforderungen und für Werkstücke mit einem Gewicht bis zehn Kilogramm hat die J. Schmalz GmbH nun den Vakuum-Erzeuger RECB entwickelt. Im Gegensatz zu seinen Schwestern der ECBPI- und ECBPMI-Baureihen erzeugt er das Vakuum rein pneumatisch. Der neue RECB ist besonders kompakt und dabei extrem leistungsstark mit einem Saugvermögen von 59 Normlitern pro Min. Der Anwender kann damit unter anderem kurze Takt- und Evakuierungszeiten in vollautomatisierten Prozessen umsetzen und profitiert dazu noch von einer hohen Leckagekompensation.
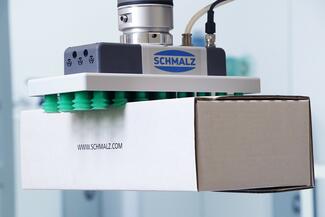
Flexibler Flächengreifer für verschiedenste Geometrien
Weitere Vorteile des RECB
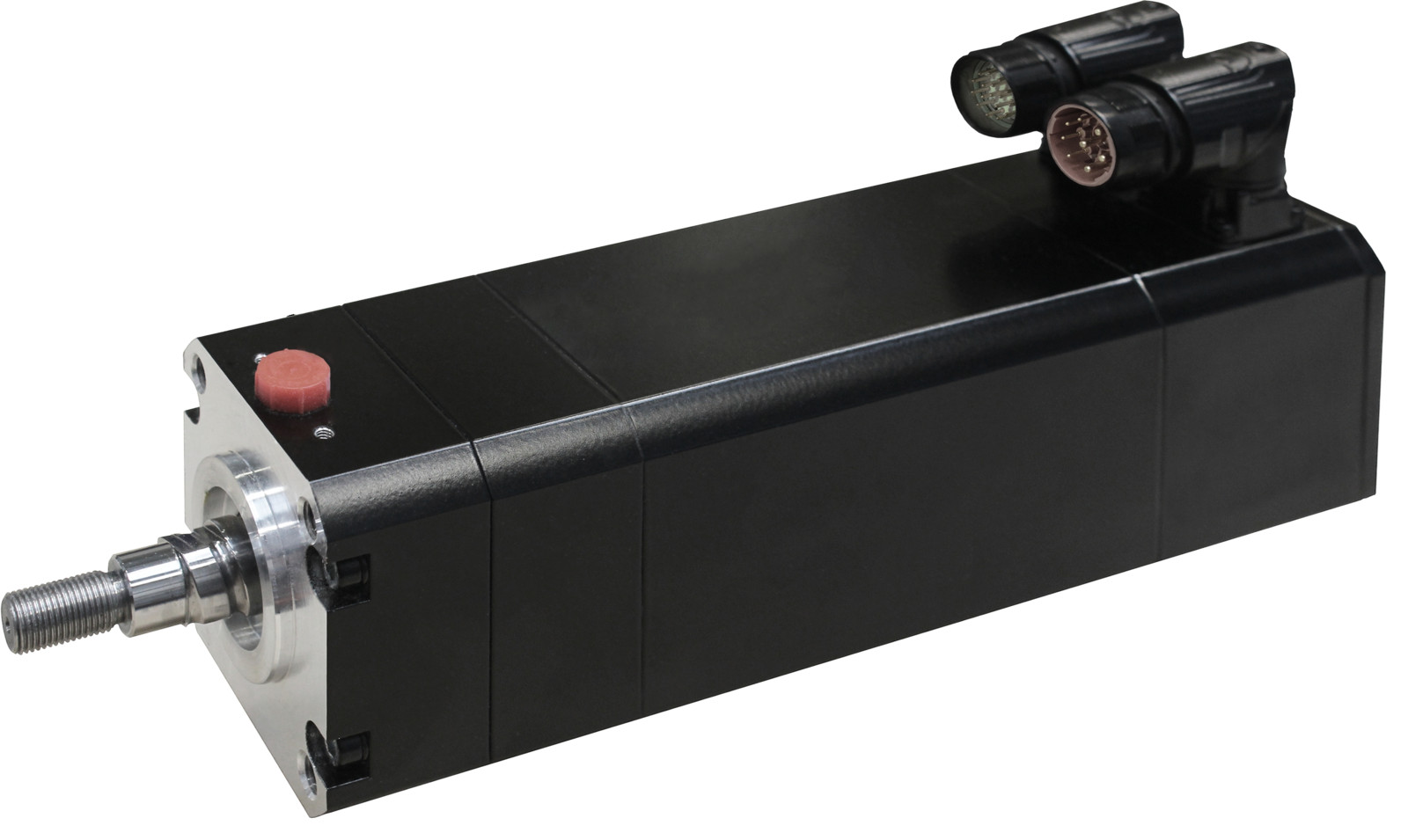
Der neue Vakuum-Erzeuger lässt sich sehr einfach mechanisch und elektrisch an den Roboter anbinden. Zudem erlaubt die geringe Bauhöhe die Montage direkt am Roboterarm bei geringer Höhenlimitierung. Angesteuert wird der neue RCEB über digitale Roboterausgänge, die Kommunikation erfolgt via IO-Link.