Das Sicherheitssystem S-Bot Speed, das Sick auf der Motek in Stuttgart präsentiert hat, ist eine integrationsfertige Komplettlösung für die kooperative Arbeit mit dem Roboter und besteht aus einem Sicherheits-Laserscanner S300 mini und einer Sicherheitssteuerung Flexi-Soft. Sie bietet neben vorkonfigurierten und geprüften Automatisierungs- und Sicherheitsfunktionen einen vollständigen Verdrahtungsplan, der eine einfache und reibungslose Systemintegration in Robotersteuerungen ermöglicht. Die spezielle Variante S-Bot Speed-UR ist optimal auf verschiedene Robotermodelle von Universal Robot (UR) abgestimmt – weitere Varianten mit anderen Roboter Herstellern sind in Vorbereitung.
Offener Zutritt zum Gefahrenbereich mit Sicherheit für Personen
Kooperative Roboteranwendungen, in denen sich Mensch und Maschine zu unterschiedlichen Zeitpunkten den gleichen Arbeitsraum teilen, unterstützen beispielsweise Prozesse in der Montage. Darüber hinaus ermöglichen sie eine flexible Anpassung an wechselnden Arbeits- oder Umfeldbedingungen.
Sicherheitssystemen fällt in diesen Szenarien die Aufgabe zu, einen jederzeit sicheren Zugang zum Gefahrenbereich des Roboters zu gewährleisten. Gleichzeitig sollen sie die Prozesseffizienz und Produktivität der Mensch-Roboter-Interaktion unterstützen, z. B. durch ein adaptives Wahrnehmungsvermögen, das es ermöglicht, die Betriebsbedingungen des Roboters automatisch an die Position von Personen im Umfeld anzupassen. Dies schützt vor Unfallgefahren und verbessert gleichzeitig die Produktivität, denn Stillstandszeiten werden reduziert und Arbeitsabläufe optimiert.
Das bietet Sick mit dem S-Bot Speed
Genau diese Philosophie verfolgt das Sicherheitssystem S-Bot Speed von Sick.
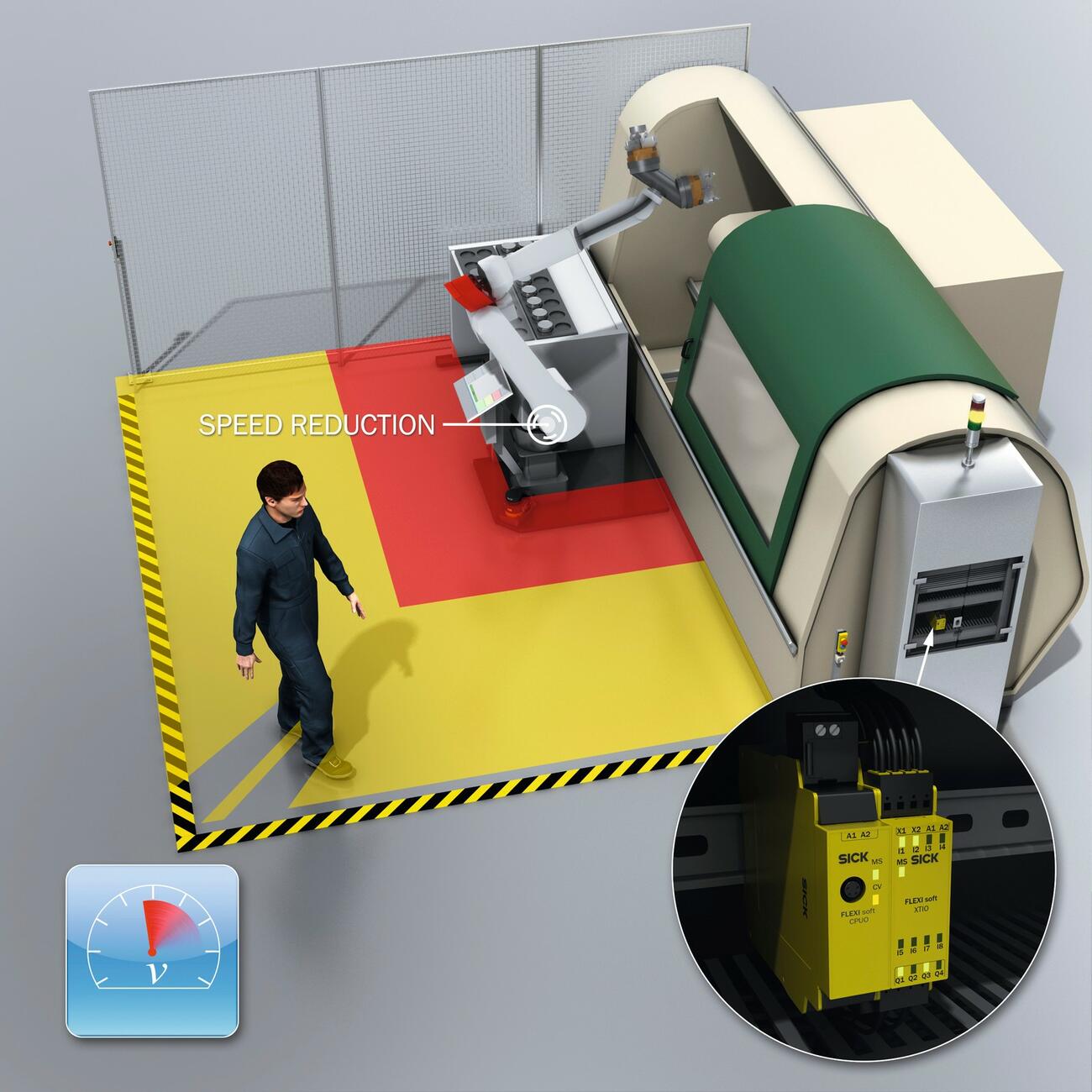
- Ein Sicherheits-Laserscanner S300 mini überwacht den Arbeitsbereich des Roboters. Hierzu nutzt er zwei von der Robotergeschwindigkeit abhängige Feldsätze – jeweils bestehend aus einem Warn- und einem Schutzfeld.
- Betritt eine Person im laufenden Prozess das Warnfeld von Feldsatz 1, reduziert der Roboter sicher seine Geschwindigkeit. Da der Roboter jetzt langsamer läuft und dementsprechend eine kürzere Nachlaufzeit im Falle eines Not-Halt aufweist, aktiviert das Sicherheitssystem Feldsatz 2 mit einem verkleinerten Schutzfeld. Wird dieses betreten, geht der Roboter in den Sicherheitshalt über.
- Entfernt sich die Person wieder aus dem Arbeitsbereich, läuft der Roboter automatisch wieder an – zunächst noch mit sicher reduzierter Geschwindigkeit und überwacht mit Feldsatz 2, um danach die ursprüngliche Arbeitsgeschwindigkeit mit Absicherung durch Feldsatz 1 wiederaufzunehmen.
Weniger Stillstand bei mehr Produktivität
Mit dem Sicherheitssystem S-Bot Speed ist es möglich, die Betriebsbedingungen von Robotern entsprechend des Aufenthalts von Personen in dessen Arbeitsbereich anzupassen. Die sicher überwachte Reduzierung der Geschwindigkeit bedeutet gegenüber einem vollständigen Stopp und Prozessstillstand mehr Produktivität und Verfügbarkeit bei optimierter Mensch-Roboter-Interaktion. Das sanft geregelte, zweistufige Abbremsen und Beschleunigen beim automatischen Wiederanfahren vermeidet unnötigen Verschleiß am Roboter und seinen Antriebskomponenten, was sich durch eine längere Lebensdauer auszahlt.
Schlüsselfertiges Sicherheitssystem für Roboter von Universal Robots
Mit der Ausrichtung von S-Bot Speed an die Anforderungen und Funktionen unterschiedlicher Roboterfabrikate und -baureihen geht Sick hinsichtlich der Systemintegration einen entscheidenden Schritt weiter. So ist die Systemvariante S-Bot Speed-UR in wesentlichen Punkten speziell auf den Einsatz in den Robotermodellen UR3, UR5 und UR10 abgestimmt. Dies betrifft beispielsweise den UR-spezifischen Verdrahtungsplan oder die Beschreibung und Anbindung zusätzlicher Sicherheitskomponenten, die zur Erfüllung relevanter Sicherheitsstandards erforderlich sind.
Darüber hinaus sind der Verdrahtungsplan, das Sicherheitslogik-Programm, die UR-bezogenen Parametereinstellungen und die SISTEMA-Datei in der ausführlichen Dokumentation enthalten. Die gezielte Abstimmung auf UR-Roboter betrifft auch die wählbaren Betriebsarten „Aktivbetrieb“ und „Programmiermodus“. Das Sicherheitssystem S-Bot Speed-UR ermöglicht es dem Inbetriebnehmer oder dem Bediener, beim Einrichten des Roboters oder bei Änderungen von Funktionen den Roboter zu programmieren und dabei sicher zu bewegen, beispielsweise zum Einlernen von Greifpunkten.
Das Sicherheitssystem S-Bot Speed und die Variante S-Bot Speed-UR ist sofort verfügbar – weitere Varianten mit anderen Roboter-Herstellern sind in Vorbereitung.