Das Münchner Startup-Unternehmen Robominds hat sich mit dem Robotikthema „beliebige Objekte ohne Teaching greifen“ auseinandergesetzt – und eine Lösung entwickelt. Mit einer Kombination aus einer 3D-Stereovisionkamera, einem leistungsfähigen Industrierechner und der Robobrain Vision-Softwarelösung, die auf Methoden der Künstlichen Intelligenz basiert, soll die Kommisionierung von beliebigen Objekten nun möglich sein.
Das Greifen von beliebigen Objekten ohne Teaching
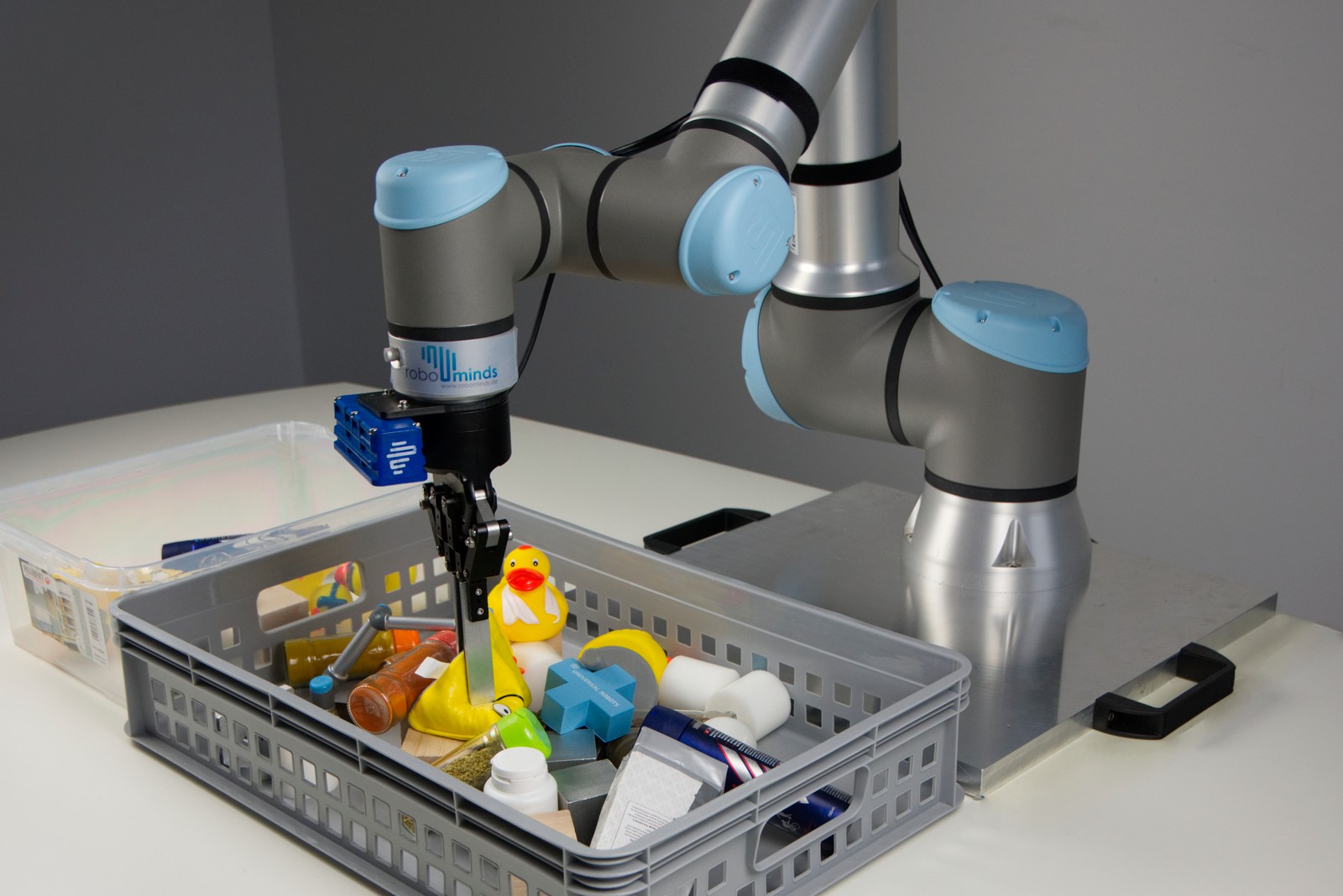
Der sogenannte „Griff in die Kiste“ zählt zu den schwierigsten Aufgabenstellungen in der Robotik. Das Ziel dieses Szenarios ist es, Roboter so zu programmieren, dass sie ungeordnete Objekte aus Kisten greifen können. Ein typischer Anwendungsfall einer solchen auch Bin-Picking genannten Aufgabe, ist die Entnahme von beliebigen Objekten und ihre Kommissionierung in der Logistik. Größtes Problem derartiger Ansätze ist meist die sichere Erkennung der unsortierten Objekte sowie der hohe Aufwand für die Programmierung der Systeme. Schon zahlreiche Unternehmen und Forschungseinrichtungen haben sich daran die Zähne ausgebissen.
Mit der Vision-Systemplattform Robobrain Vision hat das Münchner Start-up Robominds nun eine wirtschaftliche Lösung zur einfachen Implementierung solcher Bin-Picking-Applikationen durch Roboter entwickelt, die komplett ohne aufwändige und damit kostspielige Programmierung auskommt. Das absolute Alleinstellungsmerkmal des Systems beschreibt Tobias Rietzler, CEO von Robominds: „Robobrain Vision erlaubt es Robotern, beliebige Objekte zu greifen, ohne sie vorher angelernt oder eingescannt zu haben. Diese Objekte können sich dabei auch überlappen und beliebige Oberflächen und Geometrien aufweisen.“
Wie die Kombination des Systems zusammenarbeitet
Das System kombiniert eine 3D-Stereovisionkamera, einen leistungsstarken Industrierechner und die auf Methoden der Künstlichen Intelligenz aufbauende Softwarelösung Robobrain Vision. Über die präzise 3D-Kamera werden dabei mittels Stereovision zunächst hochauflösende 3D-Bilder des Arbeitsbereichs aufgenommen. Die integrierte Software Robobrain Vision bestimmt im Anschluss daran die möglichen Greifpunkte der unsortierten Werkstücke und gibt die errechneten Daten an den Roboter weiter. „Das funktioniert sogar bei wechselnden Lichtverhältnissen“, betont Rietzler. „Dass das System auch bei neuen, unbekannten Objekten arbeitet, ohne die zu greifenden Produkte im Vorfeld einzuscannen oder anzulernen, ist ein Novum“, so der Robominds-CEO.
Unterstützung durch Künstliche Intelligenz
Die von Robominds entwickelte, integrierte Softwarelösung in Robobrain Vision nutzt Methoden einer eigens entwickelten Künstlicher Intelligenz (KI), um die Greifpunkte der Werkstücke automatisch zu bestimmen – unabhängig von deren Material und Form. Deswegen können unbekannte Objekte ohne anleitende Lernschritte verarbeitet werden, was die Rüstzeiten beim Wechsel der zu greifenden Produkte reduziert. Wichtige Kameraparameter, zum Beispiel zur besseren Erkennung des Tiefenbildes, werden dabei durch das System selbst definiert. Bei der Einrichtung der Roboteraufgaben unterstützen den Anwender vorgefertigte Skript-Bausteine und Programmmodule. „Die bereits vorhandenen Tools erfüllen schon heute eine Vielzahl an Standardaufgaben, und wir werden diese Möglichkeiten in Robobrain Vision weiter kontinuierlich ausbauen“, verspricht Rietzler.
Intuitive Bedienung
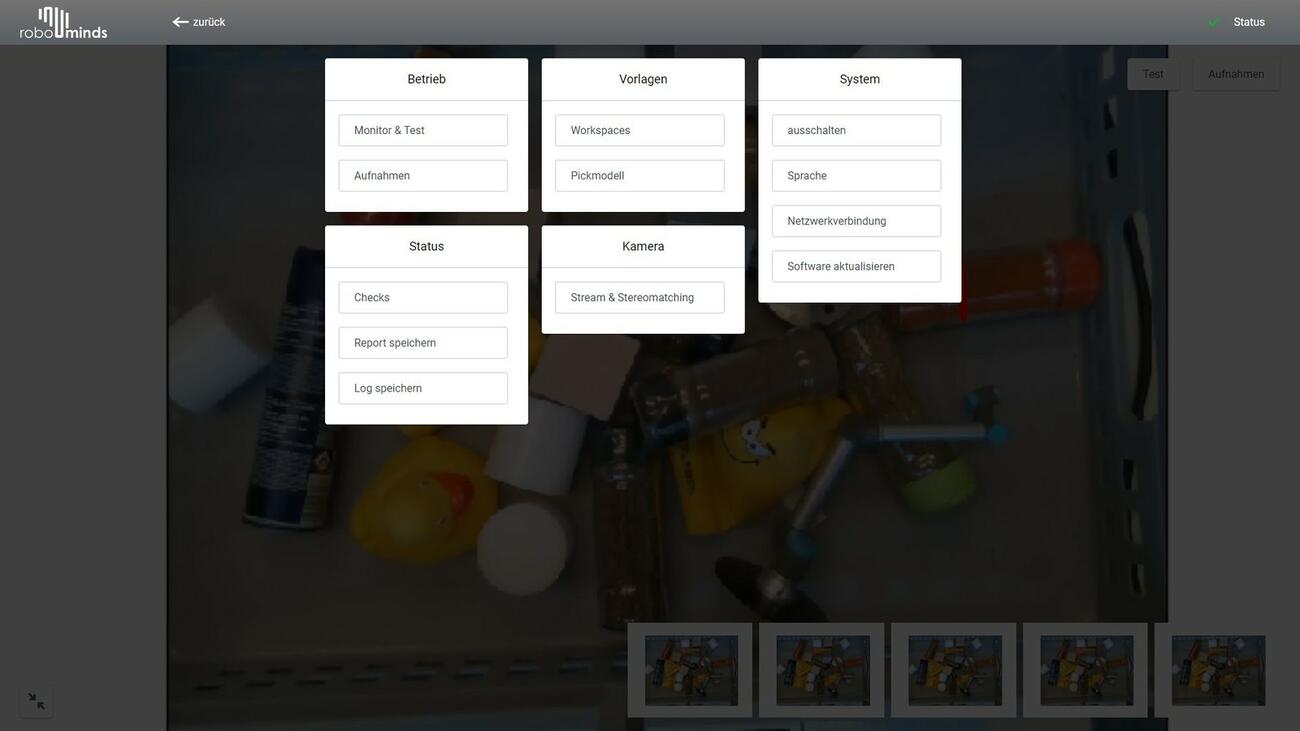
Robobrain Vision verfügt über eine intuitive Bedienoberfläche. Der Anwender kann die Konfiguration über ein großflächiges Bedienpanel oder direkt im Webbrowser vornehmen, ohne zusätzliche Software installieren zu müssen. Selbst komplexe Roboterapplikationen lassen sich auf diese Weise konfigurieren, installieren und integrieren. Mit regelmäßigen und sicheren Software-Updates sorgt Robominds dafür, dass Anwender mit der aktuellsten Version von Robobrain Vision arbeiten.
Mit einem Plug-In für Universal Robots bietet das System die Voraussetzungen für kollaborierende Roboterlandschaften, arbeitet mit einfachen Schnittstellen jedoch auch mit Robotern anderer Herstellern wie Kuka und Franka zusammen. Diese Flexibilität umfasst auch das Thema Greifen: Da die Prozesse und Greifobjekte bei jeder Anwendung unterschiedlich sein können, unterstützt Robobrain Vision eine Vielzahl an Parallel- und Vakuumgreifern, zum Beispiel On Robot, Robotiq und Schmalz.
Pilotaufträge könnten vor allem aus der Logistikbranche kommen
„Wir sind davon überzeugt, dass wir mit Robobrain Vision eine sehr innovative Lösung für Bin-Picking-Aufgaben bieten können, die den Einsatz von Robotern selbst bei kleinen Losgrößen bereits für kleine und mittelständische Unternehmen wirtschaftlich ermöglicht“, unterstreicht Rietzler. „Dies gilt aufgrund der KI-basierten Funktionsweise ohne vorheriges Anlernen sowohl für wiederkehrende, als auch für neue Anforderungen. Einen Anwendungsschwerpunkt für Robobrain Vision sehen wir dabei in der Logistikbranche, wo wir bereits großes Interesse wecken konnten und in Kürze erste Pilotaufträge erwarten. Neben diesem Bereich gibt es jedoch noch enorm viele weitere potentielle Einsatzfelder für diese Technologie.“
Deutsches Museum wird in diesem Jahr für eine neue Dauerausstellung „Science Show zur Robotik“ ausstellen, an dem die Funktionsweise von Robotern spielerisch vermittelt wird. Dort soll eine Demo verortet werden, die sich damit befasst, wie ein Roboter durch Robobrain Vision „sieht“ und dadurch die sogenannte Griff in die Kiste meistert und die Besucher eine Süßigkeit überreicht.