Autor: Greg Dutfield, Maxon; Übersetzung: Simone Käfer
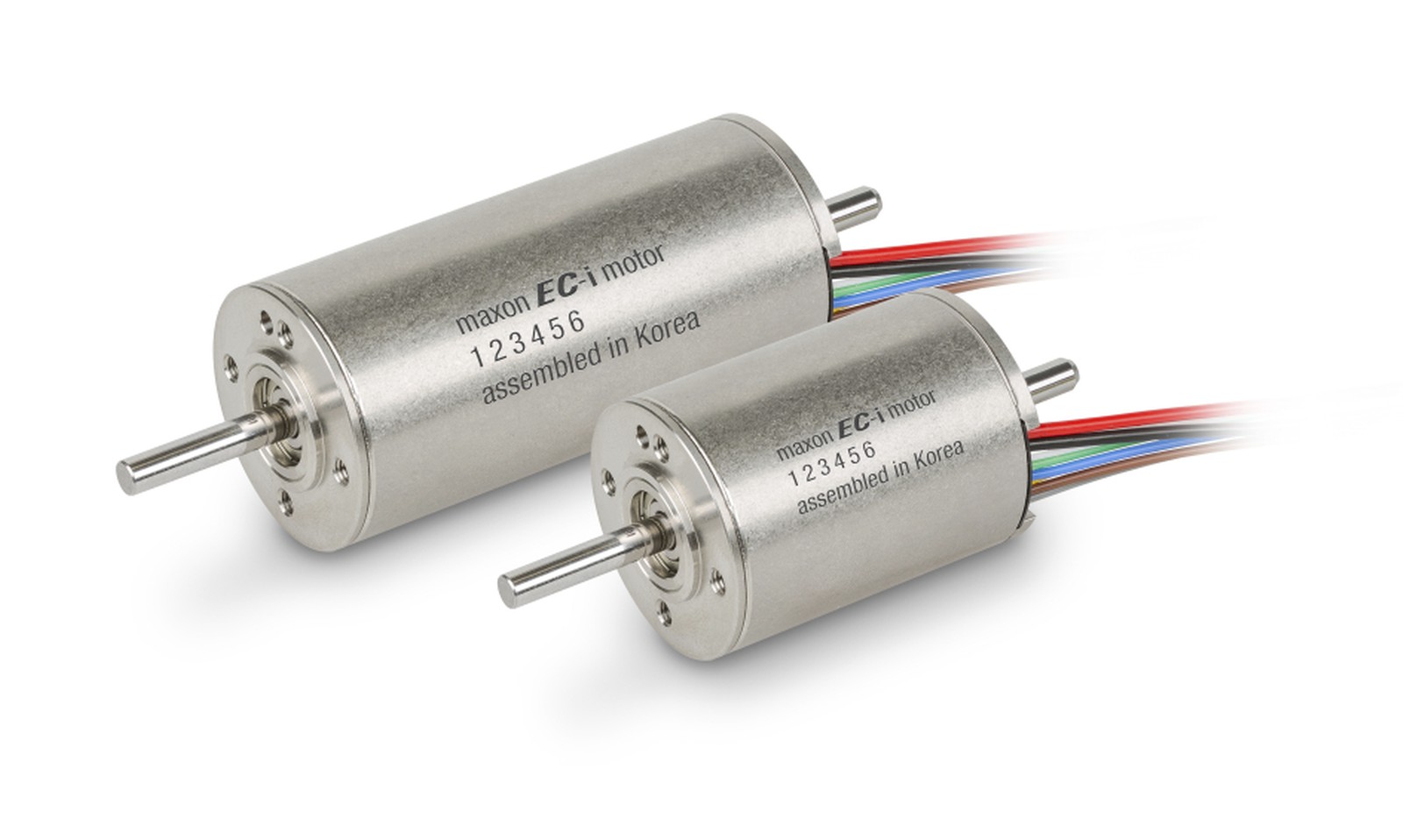
Für Gleichstrommotor-Anwendungen, die ein hohes Drehmoment bei geringem Gewicht und kompaktem Platzbedarf erfordern, können 4-polige Motoren die richtige Wahl sein. Ein 4-poliger Motor benötigt die gleiche Grundfläche wie ein 2-poliger, kann aber ein höheres Drehmoment erzeugen. Zudem ist ein 4-poliger Motor stärker als ein 2-poliger gleichen Durchmessers. Stärker bedeutet, dass er seine Drehzahl besser beibehält, wenn eine Last aufgebracht wird.
Die Polzahl und die Geschwindigkeit
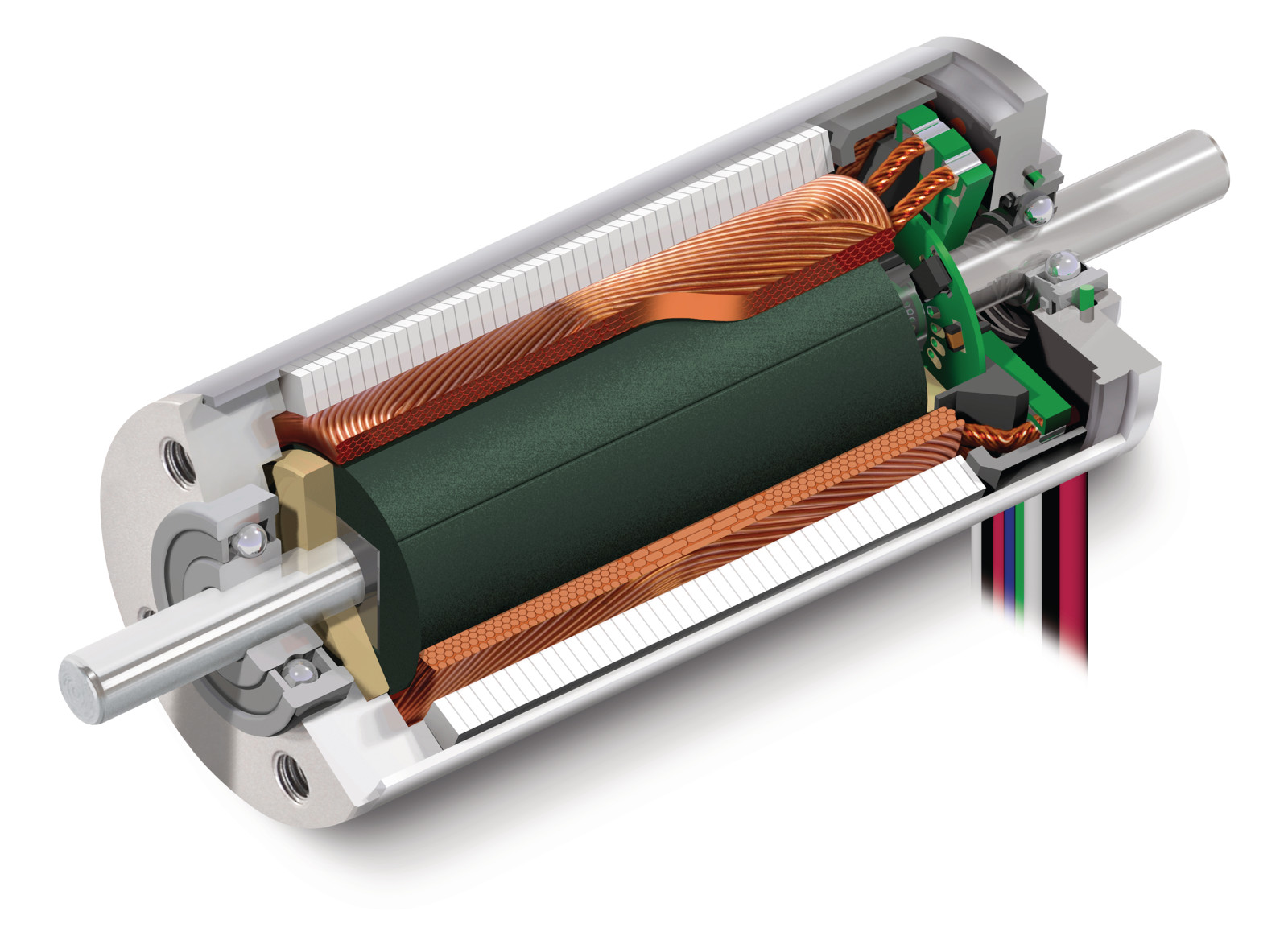
Die Polzahl bezieht sich auf die Anzahl der Permanentmagnetpaare in einem Motor. 2-polige Motoren haben ein einziges Magnetpaar in entgegengesetzter Polung (also Nord und Süd). Wenn Strom angelegt wird, entsteht zwischen dem Nord- und dem Südpol ein Magnetfeld. Dieses zwingt den Rotor, sich zu drehen. Unter den Motorkonfigurationen findet man auch 4-polige Motoren mit zwei Magnetpolpaaren bis hin zu mehrpoligen Ausführungen mit maximal zwölf Polen.
Die Polzahl ist ein wichtiger Aspekt der Motorkonstruktion, da sie sich auf die Drehzahl- und Drehmomentcharakteristik des Motors auswirkt. Je geringer die Anzahl der Pole, desto höher ist die Drehzahl des Motors. Denn: Eine Umdrehung des Rotors entspricht einem Magnetfeldzyklus jedes Polpaares. Somit benötigt er bei zwei Magnetpolen einen Zyklus für eine 360°-Umdrehung, bei vier Magnetpolen muss er schon zwei Magnetfeldzyklen durchlaufen. Die Drehzahl wird durch die Anzahl der Polpaare bei einer festen Frequenz geteilt. Ausgehend von einem 2-poligen Motor mit 10.000 U/min würde ein 4-poliger Motor 5.000 U/min erzeugen, ein 6-poliger Motor würde mit 3.300 U/min laufen und so weiter.
Die Polzahl und das Drehmoment
Ein größerer Motor kann ein höheres Drehmoment erzeugen, unabhängig von der Polzahl. Aber nicht immer kann ein Konstrukteur einfach einen größeren Motor einplanen. In solchen Fällen ist es gut zu wissen, dass eine höhere Polzahl ein höheres Drehmoment erzeugt. So wird bei einem 4-poligen Motor das Drehmoment stark erhöht, weil die kompakte Bauweise einen dünneren magnetischen Rückstrompfad aufweist. Dieser bietet mehr Platz für einen 2-poligen Permanentmagneten – und bei Motoren von Maxon auch für eine patentierte, dickere Strickwicklung.
Allerdings gilt das Phänomen „gleiche Maße, aber mehr Drehmoment“ nicht für alle Motoren. Denn will man zwölf Pole in einem Motor, der für sechs Pole gebaut wurde, unterbringen, wird das nicht funktionieren. Die Rahmengröße und die Masse müssen entsprechend angepasst werden, um das zusätzlich benötigte Kupfer, Eisen und die Magnete unterzubringen.
4-polige Motoren sind stärker
Die Stärke eines Motors wird in der Regel durch seinen Drehzahl-Drehmoment-Gradienten definiert. Das bedeutet, wenn eine Last aufgebracht wird, kann ein stärkerer Motor seine Drehzahl besser halten. Der Drehzahl-Drehmoment-Gradient wird durch die Verringerung der Drehzahl pro 1 mNm Last gemessen. Je niedriger der Wert und je geringer der Gradient, desto besser kann der Motor seine Drehzahl unter Last halten.
Ein stärkerer Motor wird durch die gleichen Konstruktionsmerkmale erreicht, die auch zu einem höheren Drehmoment beitragen. Dazu gehören größere Wicklungen und die richtigen Werkstoffe. Daher ist ein 4-poliger Motor stärker als ein 2-poliger Motor gleicher Abmessungen. Beispielsweise hat ein 4-poliger Motor von Maxon mit einem Durchmesser von 22 mm einen Drehzahl-Drehmoment-Gradienten von 19,4 rpm/mNm. Das heißt pro 1 mNm verliert er nur 19,4 rpm (revolutions per minute; dt.: Umdrehungen pro Minute), während ein ebenfalls 22 mm großer 2-poliger Motor einen Drehzahl-Drehmoment-Gradienten von 110 rpm/mNm hat. Ist der Drehzahl-Drehmoment-Gradient eines 2-poligen Motors höher, weist das auf einen schwächeren Motor hin.
Wann greift man zu einem 4-poligen DC-Motor?
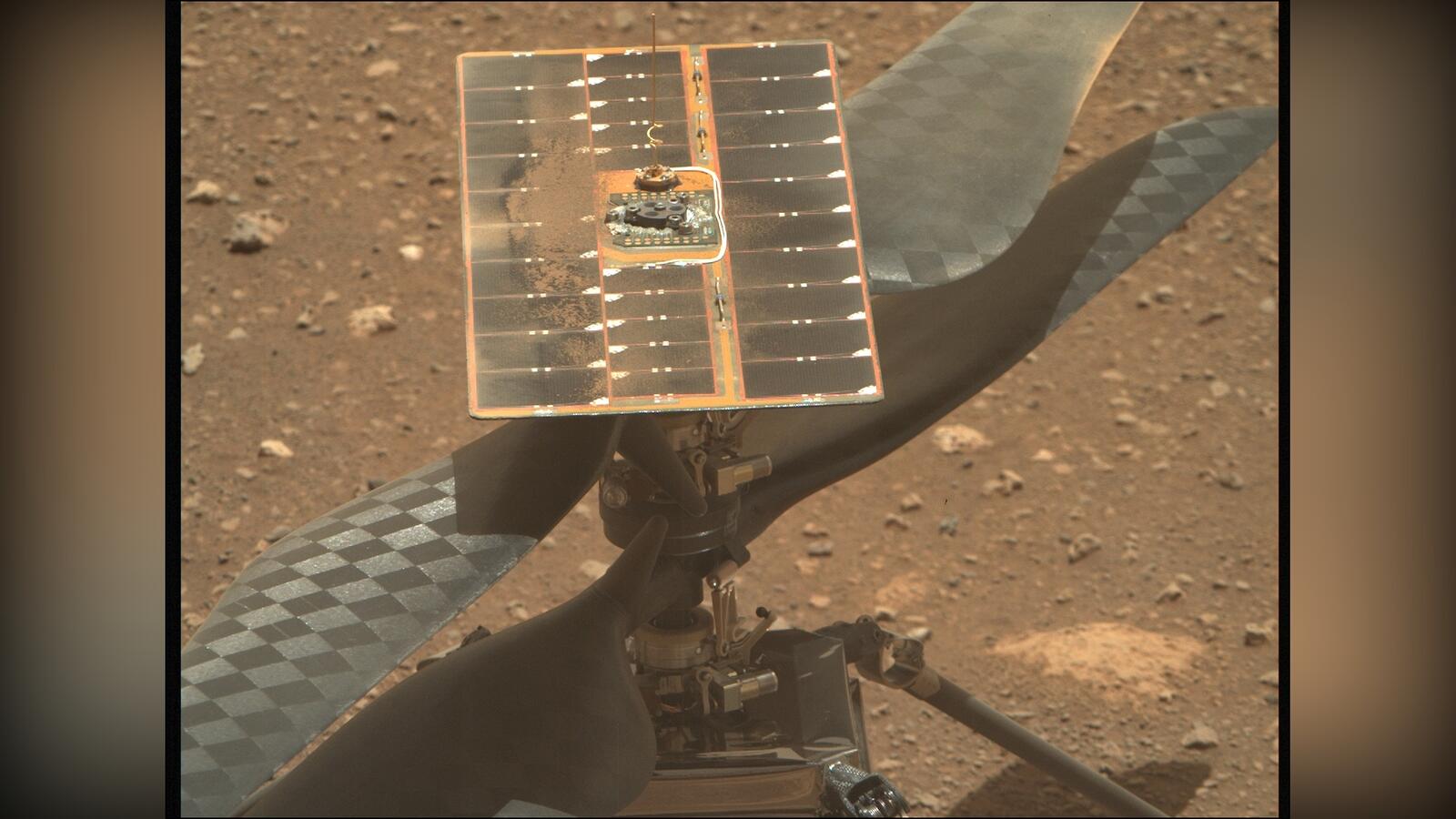
Anwendungen in der Luft- und Raumfahrtindustrie profitieren von der höheren Festigkeit eines 4-poligen Motors bei gleichzeitig geringem Gewicht. Diese Eigenschaften sind auch für handgeführte Werkzeuge sinnvoll. Dazu kommt, dass diese oft ein höheres Drehmoment benötigen, als ein 2-poliger Motor liefern kann.
Die Eigenschaften von 4-poligen Motoren sind auch für Hersteller von mobilen Robotern wichtig. Ob bei der Inspektion von Öl- und Gaspipelines oder bei der Suche nach verschütteten Erdbebenopfern, Roboter auf Rädern oder Raupen müssen unwegsames Gelände, Hindernisse und steile Steigungen überwinden. 4-polige Motoren bieten das Drehmoment und die Kraft, die zur Bewältigung dieser Belastungen erforderlich sind, und helfen den Herstellern, ein kompaktes, leichtes Design zu erreichen.

Extrem leichtes E-Mountainbike
Geringe Abmessungen in Kombination mit einem geringen Drehzahl-Drehmoment-Gefälle sind auch für die Bohrlochinspektion im Öl- und Gassektor von Bedeutung. Für diese Anwendung wäre ein kompakter 2-poliger Motor nicht stark genug, während ein mehrpoliger Motor zu groß wäre. Für solche Fälle hat Maxon einen 32 mm großen 4-Pol-Motor entwickelt.
Viele Anwendungen, für die ein 4-poliger Motor geeignet ist, finden in extremen Umgebungen oder unter extremen Bedingungen statt. Das erfordert von den Komponenten die Eigenschaft, unter hohen Temperaturen, Druck und Vibrationen zu arbeiten. Beispielsweise müssen Motoren bei Bohrlochinspektionen bei Temperaturen über 200 °C arbeiten, während Motoren in autonomen Unterwasserfahrzeugen in ölgefüllten Gehäusen verbaut sind, die bis in 6.000 m Tiefe hohem Druck standhalten sollen. Für solche extremen Betriebsbedingungen wird mit Hülsen und einer verbesserten Wärmeableitung gearbeitet.