Autoren: Prof. Dr.-Ing. Berend Denkena, Dr.-Ing. Heinrich Klemme, Dennis Kowalke, Prof. Dr.-Ing. Marc Christopher Wurz, Rico Ottermann, Michael Korbacher, Matthias Müller
Im DFG-geförderten Forschungsprojekt ‚Kraftsensitive Führungssysteme auf Basis direktabgeschiedener bauteilindividueller Sensorik‘ werden am Institut für Fertigungstechnik und Werkzeugmaschinen (IFW) und am Institut für Mikroproduktionstechnik (IMPT) der Leibniz Universität Hannover, in Kooperation mit der Bosch Rexroth AG und der Fooke GmbH, Führungswagen mit direktapplizierter, d.h. direktabgeschiedener Sensorik erforscht. Durch diese hochsensitiven Dehnungsmessstreifen (DMS) werden die auftretenden Dehnungen bestimmt und hierdurch die auf die Führungswagen wirkenden Kräfte rekonstruiert. Durch die sensorischen Führungswagen ist es potenziell möglich, im Prozess wirkende Kräfte hochgenau und stetig zu überwachen.
Kraftmessung durch neuartige DMS-Technologie
Von den Maschinenherstellern und -betreibern werden immer häufiger Zusatzfunktionen zur Prozessüberwachung gefordert. Diese dienen der Identifikation und Vermeidung von Prozessfehlern und Maschinenausfällen, z. B. in Folge von Werkzeugbruch. Eine Grundvoraussetzung für derartige Überwachungen sind geeignete Sensoren. Ein weitverbreiteter Ansatz hierfür sind strukturintegrierte DMS, die eine Messung der im Prozess wirkenden Kräfte ermöglichen (z. B. [BOU19, DEN17, LIT11]). Ein Vorteil der strukturintegrierten DMS besteht darin, dass eine Integration in der Regel auch in beschränkten Bauräumen sowie ohne mechanische Zusatzelemente möglich ist.
DMS messen Dehnungen bis 400°C
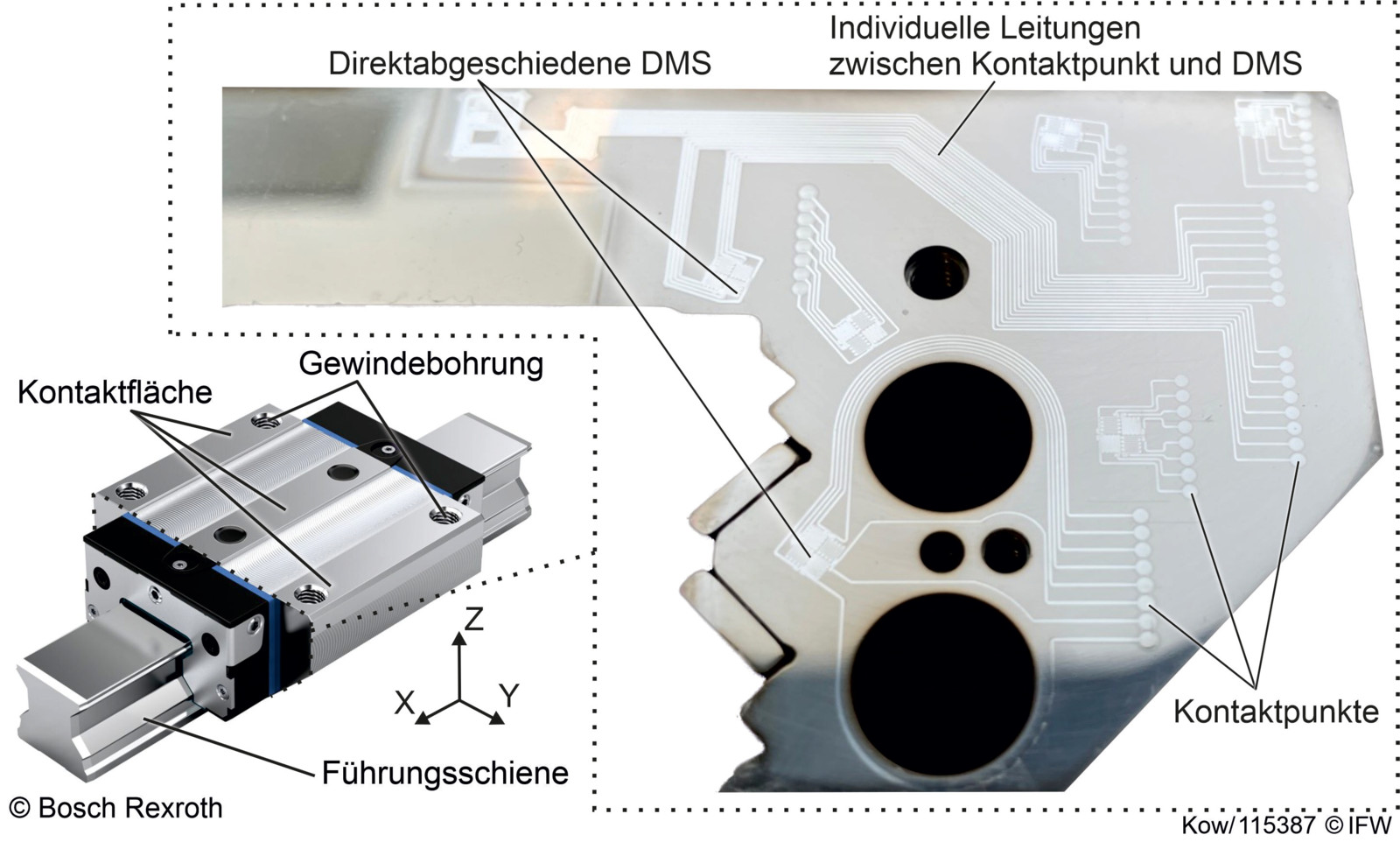
Ein bisher noch nicht optimal genutztes Potenzial besteht in der Verwendung strukturintegrierter DMS bei standardisierten Maschinenkomponenten, wie beispielsweise Linearführungen. Linearführungen bilden zentrale Funktionselemente in Vorschubachsen. Bei der Sensorintegration auf Linearführungen ist es jedoch herausfordernd, dass diese grundsätzlich sehr steif ausgelegt sind und sich diese in der Regel nicht in direkter Nähe des Werkzeug-Werkstück-Kontaktes befinden. Folglich treten in der Regel vergleichsweise geringe Dehnungen auf, sodass das DMS-Signal zur Messung von Prozesskräften gering ist. Eine genaue Bestimmung von Prozesskräften ist somit kaum möglich. Zur Steigerung der Sensitivität wird durch das IMPT Hannover ein neuartiges Verfahren entwickelt, bei dem die DMS direkt, ohne Trägerfolie und ohne Klebeverbindung, auf das Bauteil abgeschieden werden (Bild 1). Diese direktabgeschiedenen DMS konnten bereits Dehnungen bis 400°C messen [KLA20, OTT20] und plastischen Verformungen bis etwa 1 ‰ standhalten [OTT22]. Auch Eigenspannungsmessungen [HEI22] sind mit ihnen möglich. Zudem erlaubt eine entwickelte Direktbeschichtungsanlage auch die sensorische Dünnfilmabscheidung auf Bauteilen beliebiger Größe [KLA16] und auf nicht planaren Oberflächen [OTT21]. Aufgrund der direkten Anbindung der DMS auf die Oberfläche der Führungswagen sind höhere Signalamplituden zu erwarten, als es mit derzeit verfügbaren DMS möglich ist.
Grundlage: Belastungssimulationen mit FEM
In diesem Beitrag wird auf die Bestimmung geeigneter Applikationsstellen für die direktabgeschiedenen DMS eingegangen. In einem ersten Schritt werden dabei zunächst jene Sensorpositionen identifiziert, die eine richtungsaufgelöste Bestimmung der wirkenden Kräfte und Momente mit möglichst hoher Sensitivität ermöglichen. Mit den berücksichtigten Führungswagen (Typ RWD-045-FLS) soll im Stillstand eine maximale Abweichung zwischen der gemessenen Kraft und der Referenzkraft von 100 N, bei einer maximal zu messenden Kraft von 40 kN, erreicht werden. Als Grundlage zur Ermittlung der idealen Sensorpositionen werden Belastungssimulationen mit der Finite-Elemente-Methode durchgeführt. Anhand eines Sensitivitätsvektors erfolgt die Identifikation von Sensorpositionen mit möglichst großer linearer Unabhängigkeit bezogen auf ihre lastrichtungsabhängigen Empfindlichkeiten.
Auslegung optimaler Sensorpositionen
Die DMS können grundsätzlich auf allen ebenen Flächen appliziert werden, die nicht in Kontakt mit Anbauteilen (z. B. Abdeckungen und Dichtungselementen) stehen. Um die neuartigen DMS abscheiden zu können, muss jedoch mindestens eine Fläche von A = 9 mm x 9 mm vorliegen. Zur Identifikation möglicher Sensorpositionen, die besonders ausgeprägte Dehnungen aufweisen und somit besonders zur Aufbringung der DMS geeignet sind, wurde mit der Software ANSYS eine Finite-Elemente (FE) Simulation durchgeführt. Als Bewertungskriterium für die Eignung als Sensorposition wurde die Vergleichsdehnung nach von Mises sowie die Hauptdehnungsrichtung auf der Oberfläche des Führungswagens berechnet. Zur Berechnung wurden isolierte Vergleichsbelastungen mit der Kraft FVergleich = 1,0 kN in Z‑ und Y‑Richtung sowie mit dem Moment MVergleich = 1,0 kN·m um alle drei Achsen auf das Führungswagenmodell aufgebracht (Bild 2). Beispielhafte Simulationsergebnisse sind in Bild 2a‑c dargestellt. Die Einleitung der Kräfte und Momente erfolgt über die Kontaktflächen und Gewindebohrungen des Führungswagens. Für die Simulation wurden die Wälzkörper, welche das Kontaktelement zwischen Führungsschiene und Führungswagen darstellen, als Federelemente berücksichtigt (nicht dargestellt).


Mit zusätzlichem Sensor die Belastung eindeutig zugeordnet
Die Simulationen einzelner Lastfälle weisen auf eine in Teilbereichen qualitativ vergleichbare Dehnungsverteilung hin. Dies bedeutet, dass die Auswahl geeigneter Sensorpositionen nicht ausschließlich anhand der Höhe der maximal zu erwartenden Dehnung getroffen werden kann. Stattdessen sind bei der Auswahl geeigneter Sensorpositionen weitere Kriterien zu berücksichtigen, um eine korrekte Lastrekonstruktion zu ermöglichen. Ein Beispiel für eine ähnliche Verteilung findet sich in den Simulationsergebnissen für die Belastung mit einer Kraft in Y-Richtung (Bild 2a) und bei einem Moment um die X-Achse (Bild 2b). In beiden Lastfällen ähneln sich die Dehnungsverteilungen auf den Stirnflächen. Die Dehnung ist bei beiden Lastfällen besonders in den in Bild 2c rot markierten Bereichen hoch. Bei einer Belastung von FY = 1,0 kN ergibt sich eine lokale Dehnung von etwa εi,Fy = 4 µm/m gegenüber einer lokalen Dehnung von etwa εi,Mx = 51 µm/m bei einer Belastung mit MX = 1,0 kN·m. Daher kann anhand der Kenntnis über die lokale Dehnung in diesem Bereich kein Rückschluss erfolgen, ob die Belastung entweder aufgrund einer hohen Kraft FY oder eines geringen Moments MX erfolgt. Dadurch wird deutlich, dass eine einfache Berücksichtigung von Bereichen mit hoher Dehnung für die Erfassung und den Rückschluss auf einzelne Lastanteile nicht ausreichend ist. Da sich die dargestellten Dehnungsverteilungen allerdings an den grün markierten Bereichen (Bild 2c) unterscheiden, lässt sich mittels einer Applikation eines zusätzlichen Sensors an diesen Positionen die Belastung eindeutig zuordnen. Um aus den Simulationsergebnissen ein geeignetes Sensorlayout zu bestimmen, wurde ein Vorgehen konzipiert, welches auf [LIT11] basiert und im Folgenden beschrieben wird.
Sinnvoller Grenzwert 0,1
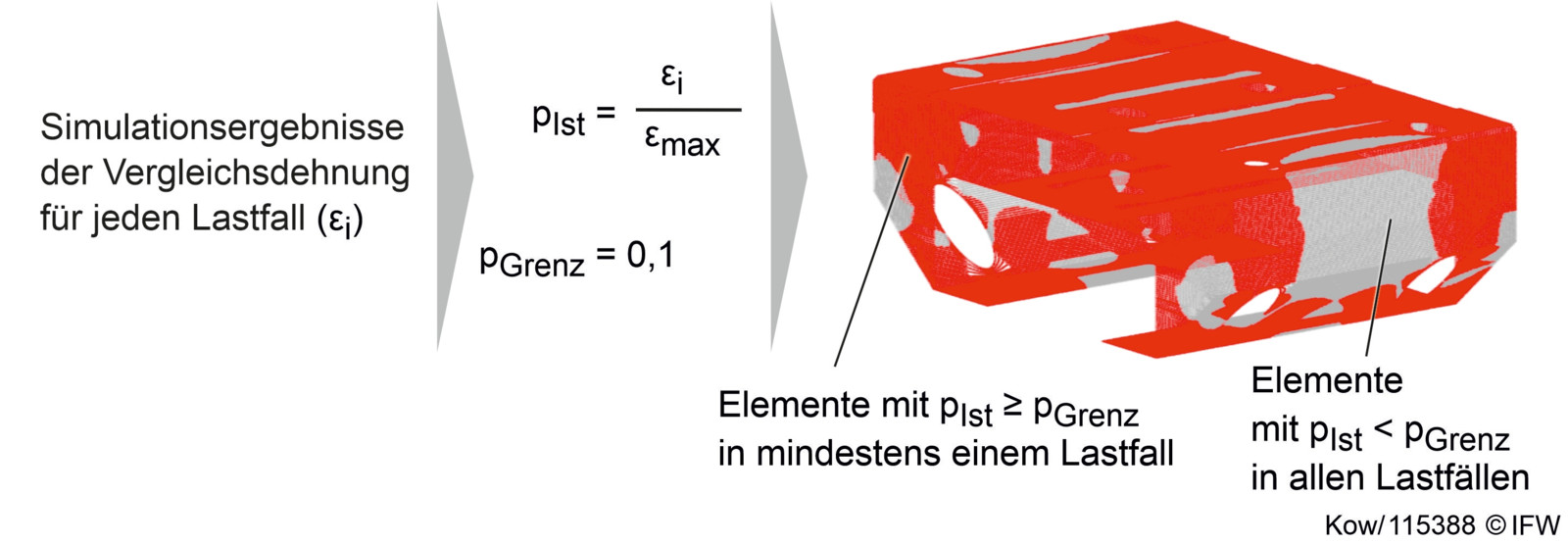
Zur Identifikation eines geeigneten Sensorlayouts wurden zunächst Oberflächenelemente des Simulationsmodells gefiltert, die potenziell für eine Sensorpositionierung geeignet sind. Das Vorgehen ist in Bild 3 dargestellt. Die potenziell geeigneten Elemente sind die Elemente i, die in mindestens einem der Lastfälle eine relative Dehnung pIst,i aufweisen die den Grenzwert pGrenz erreicht oder überschreitet. Die relative Dehnung pIst,i ist das Verhältnis zwischen der Dehnung εi und des jeweiligen Maximalwert εmax des Lastfalls.. Im Rahmen der Untersuchungen hat sich ein Grenzwert von pGrenz = 0,1 als sinnvoll herausgestellt. Durch diese Filterung werden jene Elemente für nachfolgende Berechnungen nicht berücksichtigt, die für alle Lastfälle eine geringe Sensitivität aufweisen und damit für eine Kraftrekonstruktion weniger geeignet sind. Die Elemente mit einer relativen Dehnung oberhalb des Grenzwertes (pIst ≥ pGrenz) sind in Bild 3 rot dargestellt. Die Elemente mit geringerer Sensitivität sind grau dargestellt.

Sensitivitätsvektor wird berechnet
Als Grundlage zur Positionierung wird der Sensitivitätsvektor für ein jedes Element berechnet. Mithilfe eines randomisierten Algorithmus werden Bereiche mit Elementen identifiziert, die in Bezug auf den Sensitivitätsvektor möglichst unabhängig sind. Dies bedeutet, dass, ausgehend von einem zufälligen Startpunkt, ein Oberflächenpunkt berechnet wird, der in seiner Sensitivität am unabhängigsten von dem zuletzt betrachteten Punkt ist. Mit zunehmender Iteration dieser Berechnung ergeben sich zusammenhängende Bereiche so identifizierter Punkte. Durch die Wiederholung der Berechnung mit unterschiedlichen Startpunkten und den Vergleich der entstehenden Bereiche lässt sich der Einfluss des Startwertes auf die identifizierten Sensorpositionen begrenzen. Zur Begrenzung der Anzahl an umzusetzenden Sensorstellen auf eine für die praktische Anwendung sinnvolle Anzahl, findet anschließend eine finale, manuelle Auswahl der Sensorpositionen statt. Diese erfolgt unter Berücksichtigung der Maximierung der Sensitivität und der Abdeckung aller relevanten Lastrichtungen.


Verrechnung weiterer Sensorpositionen erforderlich
Für den betrachteten Anwendungsfall sind die in Bild 4a dargestellten Sensorpositionen als besonders sensitiv identifiziert worden. Die Auswertung der Sensitivitäten si,L an diesen Positionen ist in Bild 4b für die verschiedenen Lastfälle L dargestellt. Für eine Kraft FY in Y-Richtung besitzen die Sensorpositionen 1, 5 und 6 mit s ≈ 2,0 µm/(m·kN) die höchsten Sensitivitäten. Bei einer Kraftbelastung in Z-Richtung besitzt hingegen die Sensorposition 7 mit s ≈ 1,0 µm/(m·kN) die höchste Sensitivität. Für die Momente haben insbesondere die Sensorpositionen 3 (MY), 4 (MZ) und 5 (MX) hohe Sensitivitäten. Um eine Belastungsunterscheidung zwischen beispielsweise einem Moment MX und einer Kraft FY – in beiden Fällen liegt eine hohe Sensitivität an der Position 5 vor – zu ermöglichen, ist eine Verrechnung mit den Daten weiterer Sensorpositionen erforderlich. In naher Zukunft werden Funktionsmuster mit direktabgeschiedenen Dehnungsmesstreifen an den identifizierten Sensorpositionen hergestellt. Im Rahmen der Untersuchungen der Funktionsmuster wird ein Modell zur Verrechnung der Sensordaten aufgestellt, um die einzelnen Lastkomponenten zu bestimmen. Im weiteren Verlauf des Forschungsprojektes werden die sensorischen Eigenschaften des bewegten Führungswagens untersucht. Dazu werden zuerst die Eigenschaften eines einzelnen Führungswagens charakterisiert und anschließend die Wechselwirkungen in einem Achsverbund aus mehreren Führungswagen untersucht.
Acht geeignete Sensorpositionen ermittelt
Zur Messung von Prozesskräften mithilfe von standardisierten Maschinenkomponenten wurden geeignete Positionen für Dehnungsmesstreifen auf einer Linearwälzführung ermittelt. Hierzu wurden simulationsgestützt die erwarteten Dehnungen unter Vergleichslasten bestimmt. Unter Ausschluss von Bereichen mit geringer Sensitivität wurden mithilfe eines randomisierten Algorithmus potenzielle Sensorpositionen identifiziert, deren Sensitivitäten möglichst linear unabhängig sind. Aus den potenziellen Sensorpositionen wurden acht potenziell geeignete Sensorpositionen für die Umsetzung in einem Funktionsmuster ermittelt. Im weiteren Verlauf des Forschungsprojektes wird dieses Funktionsmuster charakterisiert. Das Forschungsprojekt wird gefördert durch die DFG. Des Weiteren danken die Autoren den Firmen Bosch Rexroth AG und Fooke GmbH für die Unterstützung. Weitere Infos über die aktuellen Forschungsprojekte erklärt das IFW hier auf der Website.