

Auf der Hannover Messe hatten sich unser Konstruktion & Entwicklung-Chefredakteur Erik Schäfer und Helmut Schmid, Geschäftsführer Deutschland und General Manager Western Europe von Universal Robots, bereits zum Interview getroffen. Helmut Schmid sagte damals, „dass man die Grundlagen der Roboterprogrammierung eines UR-Roboters in einer Stunde verstehe.“
Eine Stunde? Das wollte unser Chefredakteur dann schon genauer wissen und besuchte UR in München-Sendling. UR Deutschland-Geschäftsführer Helmut Schmid und sein Kollege Stefan Kollmannsberger – der für die Zertifizierung für das UR+-Programm verantwortlich ist – hatten sich die Zeit genommen, um den Beweis anzutreten, dass man die Grundlagen des UR-Roboters in nur einer Stunde verstanden hat.
Kann ein UR-Roboter wirklich in einer Stunde programmiert werden?
9:30 Uhr: Ankunft bei Universal Robots (UR). Das Unternehmen ist in München-Sendling im 3. Stock des Gebäudes B eines hochmodernen Bürokomplexes zu finden. Helle, freundliche und modern, minimalistisch eingerichtete Räume (von Besprechungszimmern und Büros bis zu Schulungsräumen – mit aufgebauten UR-Robotern – für die Schulung von Kunden nach deren Spezifikationen und der Serviceteams). Helmut Schmid ist entspannt. Bevor es überhaupt zum Programmieren/Teachen des UR-Roboters kommt zeigt er die Büro- und Schulungsräume, um vorab ein paar grundsätzliche Dinge zu erläutern.

9:45 Uhr: „Jeder UR-Roboter wird in zwei Pappkisten geliefert. In dem einen ist der Roboterarm (IP 54), im anderen Karton sind die Controlbox (IP 44) und das Teach-Panel (IP 54) eingepackt. Wenn Sie alles den Kisten entnommen haben, müssen Sie nur noch den Roboter an die Controlbox anschließen (Kabel mit einfachem Bajonettverschluss), und das 220-Volt-Stromkabel an der Controlbox anschließen (einfach einstecken und einrasten). Dann stecken Sie den 220-Volt-Stecker in die Steckdose und schon können Sie beginnen“, so Helmut Schmid. Wir verwenden zum „Programmiertest“ allerdings einen bereits fertig aufgebauten Roboter (einen UR3e).

9:48 Uhr: Sobald der Power-Schalter am Teach-Panel eingeschaltet ist (oben mittig über dem Bildschirm), wird der Roboter eingeschaltet und es fährt die Linux-basierte Steuerungssoftware hoch. Das geht recht fix. Dann werden die Bremsen des Roboters (die in den Gelenken sitzen) gelöst (durch Antippen des entsprechenden Menüpunktes) – der Roboter ist startbereit.
9:50 Uhr: Helmut Schmid achtet sehr darauf, nicht zu viel zu sagen. Er will sehen, ob ich das intuitiv zu bedienende Teach-Panel auch tatsächlich eigenständig bedienen kann. Nur den „Freedrive Button“, der am Teach-Panel hinten in Höhe der Zeigefingerspitze sitzt, erklärt er kurz: „Wenn Sie den Free-Drive-Button gedrückt halten, können Sie den Roboterarm frei bewegen und ihn zu den gewünschten Wegpunkten führen. Hier kurz zum Hintergrund: Es werden in der Programmieroberfläche nur Wegpunkte eingelernt. Der Pfad wird vom Roboter an Hand gewisser Vorgaben berechnet. Der Freedrive Button dient hier lediglich dazu, den Arm im Raum per Hand zu führen. Die Wegpunkte werden dann über einen Befehl/Knoten im Roboterprogramm eingelernt.“ Natürlich sind auch seine Fragestellungen kleine Hinweise, dennoch kann man schnell selbst ersehen, wie es nun weitergehen könnte. Nach jedem manuellen Verfahren bestätigt man die einzelnen Wegpunkte (in meinem Fall 1-3), die nach jeder Bestätigung am Teach-Panel einer Liste hinzugefügt werden. Mit dem Start Symbol (Der Dreieckspfeil wie zum Abspielen eines Videos) startet man die eingeteachten Bewegungsabläufe – der Roboterarm fährt die eingegebenen Bahnen ab.

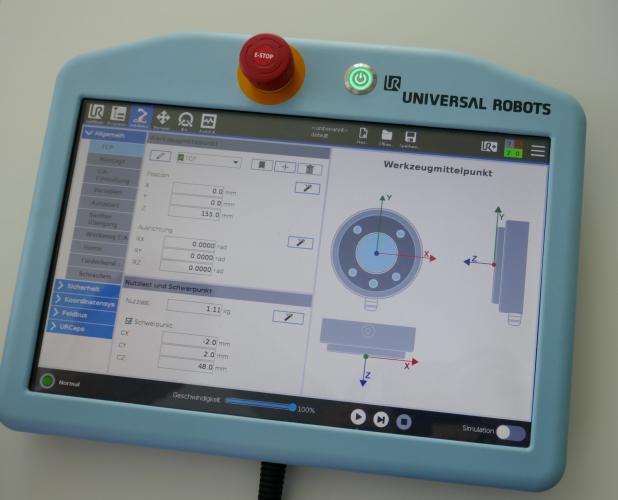
10:10 Uhr: Stefan Kollmannsberger, der Spezialist für UR+ (den von ihm für den UR+-Bereich zertifizierten UR-Komponenten, wie Greifer, Kameras, Anbauteile etc.) kommt hinzu und erklärt nun die Funktionen des angebauten Greifers des Herstellers Robotiq Inc. aus Kanada. Vorab aber weist er auf eine Besonderheit der UR-Roboter der e-Serie hin: „Die Robotermodelle der eSeries besitzen direkt hinter dem Tool-Flansch – an dem Punkt an welchem Greifer etc. montiert werden – einen Kraft/Momenten Sensor. Das erlaubt es, dass der Zweifingergreifer nicht nur Hinsichtlich Position und Geschwindigkeit einstellbar ist, sondern auch in Sachen Kraft – wie stark er greift oder sich in Z-Richtung des Roboterarms vorbewegend „herantasten“ kann.“
So lässt sich die Kraft z.B. auf 1 Newton festlegen und sobald der Widerstand (eine hingehaltene Hand, die die Vorwärtsbewegung des Roboterarmes aufhalten möchte, oder einfach ein festes Hindernis) den Einstellwert überschreitet, hält der Arm automatisch an. Übrigens, die Greifer-Software des jeweiligen Herstellers kann vorab per USB-Stick direkt ins Teach-Panel geladen und initialisiert werden.
10:20 Uhr: Nun erklärt Stefan Kollmannsberger kurz, wie der Greifer zu aktivieren ist, denn UR baut ja nur die Roboter selbst, nicht aber die Peripherie. Daher ist das ein Extrapunkt im Menü. Sobald man die Extra-Schaltfläche angetippt und die entsprechende Komponente (Greifer) aktiviert hat, die an der Roboterhand montiert ist, öffnet sich ein selbsterklärendes Menü. Hier lassen sich „Position“, „Speed“ (Geschwindigkeit) und „Force“ (Kraft) per Fingertipp individuell einstellen. Beginnend von 100% muss man die Schaltfläche nur angetippt lassen und schon fährt der Wert entsprechen herunter oder wieder bis zu 100% herauf. Feintuning kann man mittels eines Pfeiltastenmenüs betreiben. Nach „Safe“ ist auch der Greifer programmiert. Klasse ist hier, dass man die Programmebene nie verlassen muss, ob man nun den Roboterarm selbst teacht, oder etwa einen angebauten Greifer.
Gegen 10:35 Uhr: Nun kann das (Greifer) Programm wieder mit der Dreieckstaste (wie schon beim Starten des Roboterarms) aktiviert/ausgeführt werden. Dazu wird die Greiferbewegung als Wegpunkt 4 hinzugefügt. Da dieser Punkt oben in der Liste vor den (Roboterarm-) Wegpunkten 1-3 erscheint, muss er nur mittels Pfeiltaste ans Ende der Liste bewegt werden –, bestätigen, fertig. Der Roboterarm und der Greifer bewegen sich nun in den eingelernten Bahnen. Der Greifer greift meinen Kugelschreiber von der Arbeitsplatte, hebt ihn hoch, schwenkt ihn, senkt sich etwas und lässt den Kugelschreiber dann auf die Arbeitsplatte fallen – genauso, wie ich es ihm (tatsächlich) in nur einer Stunde „eingegeben“ habe.
Fazit: Der Praxistest ist bestanden!
Es war kein „Marketingsprech“, dass man die ersten Programmier-Grundlagen für UR-Roboter in nur einer Stunde erlernen kann. Natürlich kann das Ganze noch sehr vertieft werden und für „echte“ Programmierer steht der Programmierung eigener Programme – hauptsächlich mittels der Programmiersprache Java – nichts entgegen. Dennoch ist mit dem „Teachen“ ein wichtiges Ziel erreicht: Schnell kann jeder Anwender ein Erfolgserlebnis mitnehmen. Das nimmt die „Angst“ vor dem Roboter und lässt ihn schnell zum nützlichen Werkzeug werden.

Mittels kleiner Assistenzprogramme, wie der vorab beschriebenen Kraftfunktion oder Programmpunkten wie etwa dem Palettieren, Stapeln etc., lassen sich Routineaufgaben für einen Roboter noch wesentlich effizienter programmieren. Beim Palettieren etwa werden nur Zeilen und Spalten und die Eckpunkte vordefiniert – schon spart man sich jede Menge Programmieraufwand. Mit nur wenigen Werten „weiß“ der Roboter wohin er greifen muss.
Alles in allem, hat diese eine Stunde bei Universal Robots gezeigt, dass die Begegnung mit kollaborativen Robotern ein sehr positives Erlebnis sein kann, das den Wunsch auslöst, noch mehr zu verstehen und den Roboter noch effektiver zur jeweilig gestellten Aufgabe zu „erziehen“.




