

Nachdem erweiterte Assistenzsysteme längst in der KFZ-Kompaktklasse angekommen sind, wächst mit der steigenden Nachfrage nach smarten Fahrzeugen auch der Markt für die zugrundeliegende Technik wie LED-Systeme, Ultraschall, Lidar usw. Sinkende Komponentenkosten insbesondere bei der Sensorik und die steigenden Anforderungen der Autokäufer in Bezug auf sogenannte Level-2- und Level-3-Fahrfunktionen erhöhen den Druck auf Fahrzeughersteller und Zulieferer und treiben die Entwicklung weiter voran. Und auch wenn es in der technischen Diskussion oftmals anders wirkt – in einer echten Konkurrenzsituation stehen die verschiedenen Technologien, zum Beispiel Kamerasysteme, Radar- oder Lidar-Sensoren, nur selten. Vielmehr haben die verschiedenen Technologien jeweils ihre Kernkompetenzen, die in der Summe dann für mehr Sicherheit und Komfort sorgen.
Um die aktuell noch hohen Kosten von Lidar-Sensoren zu reduzieren und gleichzeitig die Lebensdauer der Sensoren zu erhöhen, setzen die Entwicklungsabteilungen verstärkt auf sogenannte Solid State Sensoren. Wie unterscheiden sich die verschiedenen Lidar-Technologien voneinander? Welche Vorteile bieten Solid State Sensoren? Und wo stoßen sie an Ihre Grenzen?
Assistenzsysteme sind kein Luxus mehr
Fahrassistenzfunktionen bis hin zum teilautonomen Fahren werden für die Kunden immer wichtiger und sind von einer imageträchtigen Spielerei zum relevanten Kaufkriterium geworden. Die Veränderung der Mobilität und auch die Zunahme von E-Fahrzeugen feuert den Trend zusätzlich an. Und es kommt Druck auf die Entwicklungsabteilungen der Fahrzeughersteller durch neue Regulatorien (EU Vehicle General Safety Regulation, Vision Zero) oder angepasste Crashtest-Anforderungen. Im Ergebnis wetteifern aktuell gleich mehrere OEMs um die begehrten Level-3-Zulassungen – dem halbautomatisierten Fahren, bei dem der Fahrer zumindest vorübergehend in bestimmten Situationen Fahraufgaben und Verkehr der Technik überlassen darf. Die technischen Voraussetzungen sind gegeben und werden aktuell durch ein ganzes Orchester von Sensoren abgedeckt.
Aus Sicherheitsaspekten tendieren viele Automobilhersteller dazu, verschiedene Sensoren mit ihren unterschiedlichen Stärken und Schwächen zu fusionieren, um ein stets zuverlässiges Gesamtsystem zu erhalten. Es erscheint nur konsequent, auf eine Vielzahl an Technologien zurückzugreifen, anstatt eine bestimmte Lösung exklusiv zu verwenden. Betrachten wir dazu einmal die „großen Drei“ (Kamera, Radar, Lidar) genauer:
- Die Kamera hat eine vergleichsweise hohe Auflösung und kann Farben gut wahrnehmen (z.B. Ampeln oder Verkehrsschilder). Es ist heutzutage verhältnismäßig einfach, kamerabasiert Objekte zu identifizieren. Ein großer Nachteil von Kameras ist, dass diese bei schlechten Sichtverhältnissen, zum Beispiel bei Nachtfahrten, keine ausreichenden Informationen liefern. Außerdem können Sie Personen-Nachbildungen, wie die „Achtung Kinder-Aufsteller“ häufig nicht von realen Menschen unterscheiden. Und: Kameras können nur sehr ungenau Entfernungen einschätzen. Der Vorteil der Kameras ist natürlich, dass sie kostengünstiger sind. Aber Lidar- und Radar-Sensoren erweisen sich auch bei schlechten Sichtverhältnissen als verlässlichere Quellen. Entsprechend hagelte es zu Recht Kritik, als sich Tesla-Chef Elon Musk gegen die Nutzung von Sensorentechnologie abseits von Kameras aussprach.
- Radar ist gut für die Detektion von metallischen Objekten (Autos) und robust gegen Wetter. Radar nutzt Radiowellen, die Lidar-Sensoren hingegen nutzen Laserlicht. Da die Radio-Wellenlänge im Vergleich deutlich größer ist, findet kaum Streuung an kleinen Teilchen, wie Nebeltröpfen oder Staubpartikeln, statt. Daher können Radar-Sensoren gut durch Nebel/Staub hindurchmessen. Der Nachteil der Radar-Technik ist, dass sie im Vergleich zum Lidar-Sensor, der mit „Punktwolken“-Strukturen Objekte bis ins kleinste Detail darstellen kann, als Folge der größeren Wellenlänge eine ungenauere Winkelauflösung hat. So werden zum Beispiel zwei Objekte, die in ähnlicher Entfernung dicht beieinanderstehen, häufig als ein Objekt dargestellt.
- Lidar-Sensoren können auch bei widrigen/wechselnden Sicherverhältnissen mit einer hohen Winkel- und Distanzauflösung Entfernungen bestimmen. Sie sind also in der Lage die Schwächen der anderen beiden Sensoren zu kompensieren, was sie so wertvoll für die Sensorfusion macht. Lidar misst mit gebündeltem Licht in Form von Laserstrahlen. Die Sensoren führen bis zu 150.000 Messungen pro Sekunde durch. Ihre Signale werden von Objekten reflektiert und über die Zeit, die das Signal benötigt, um wieder beim Sensor anzukommen, lässt sich der Abstand zum Objekt sehr akkurat bestimmen. Durch diese genaue Distanzmessung ist die Nutzung von Lidar fürs autonome Fahren heute nicht mehr wegzudenken.

Autonomes Fahren bei schlechter Sicht – aber sicher!
Warum sind Lidar-Sensoren so teuer?
Für die Erfassung des gesamten Umfelds gibt es verschiedene Sensorvarianten. Die Arten, die auf dem Laufzeitprinzip basieren, unterscheiden sich dabei darin, wie die aufgenommene Szene mit den einzelnen gesendeten Laserpulse abgescannt wird. Es gibt zum Beispiel Sensoren, die rotieren, wodurch die Laserpulse um bis zu 360 ° abgelenkt werden können – das sogenannte mechanische Scannen. Dafür müssen meist mehrere Messmodule übereinandergelegt werden. Die Bauart ist auch deshalb sehr komplex und benötigt entsprechend viel Platz. Noch sind konventionelle Lidar-Sensoren entsprechend kostenintensiv. Aktuell liegt der Preis in einem fünfstelligen USD-Bereich, während die Preise für Kameras und Radar-Sensoren durch industrielle Massenfertigung und einfachen Aufbau eher im zweistelligen US-Dollar-Bereich liegen. Der Grund für diesen Preisunterschied sind besonders die rotierenden Teile in konventionellen Lidar-Systemen. Rotierende Teile sind immer ein extra Bauteil in der BOM (Bill of Material) und wegen des mechanischen Aufbaus, der wartungsfrei über die gesamte Lebensdauer des Autos funktionieren muss, in der Regel wesentlich teurer als rein elektronisch angesteuerte Systeme.
Kostengünstige und kompakte Solid State Sensoren
Auch aus diesen Gründen entwickeln und nutzen wir bei Ibeo Automotive Systems so genannte Solid-State-Lidar-Sensoren: Diese benötigen keine beweglichen Teile und sind somit um einiges kompakter gebaut als konventionelle Lidar-Sensoren. Der Vorteil eines „echten“ Solid-State-Sensors ist, dass durch die fehlenden beweglichen Teile weniger Platz benötigt wird, das Design einfacher ist und der Preis somit geringer wird. Dabei wird das gesamte Sichtfeld, das Field of View (FOV), ohne rotierende Spiegel abgedeckt.
In der Industrie werden weitestgehend vier verschiedene Möglichkeiten genutzt, um das Field of View (FOV), also das gesamte Sichtfeld, ohne rotierende Spiegel abzudecken. Folgende Solid State Ansätze werden aktuell verfolgt:
- Eine Möglichkeit besteht darin, einfach die gesamte Szene auf einmal zu beleuchten und auf einen Scanmechanismus zu verzichten. Diese Lidar-Konstruktion wird als ʻFlashing-Lidarʼ bezeichnet und flutet die Szene mit einem einzigen für das menschliche Auge unsichtbaren optischen Puls. Der Nachteil ist in der Regel die geringe Reichweite, da ein einziger Puls genügend optische Energie für die Entfernungsmessung jedes einzelnen Detektors liefern muss. Die maximale Energie, die man dabei aussenden kann, ist dabei technisch sowie durch Augensicherheitsvorschriften begrenzt. Die Vorteile sind, dass hier sehr hohe Bildraten möglich sind, vorausgesetzt alle Daten können verarbeitet werden.
- Die MEMS-Mirror-Technik (MEMS steht für MicroElectroMechanicalSystem) ist umstritten, zumindest bezogen auf den Solid-State-Status. Hierbei rotiert der Spiegel zwar nicht, er oszilliert aber in mindestens einer Ebene. Da sich diese Bewegung im elastischen Bereich des Materials abspielt und es deshalb in der Regel keinen Verschleiß und keine Wartungsanfälligkeit gibt, wird diese Technologie oft als Solid-State bezeichnet. Zweidimensional scannende MEMS-Spiegel mit einem einzigen Messpfad sind ebenfalls möglich. Diese sind jedoch schwieriger zu bauen, zu betreiben und zu nutzen.
- Bei der „Spectral Deflection“, die in Kombination mit einem Fiber-Laser verwendet wird, wird das ausgesandte Licht wie bei einem Prisma abgelenkt. Ein Prisma lenkt Licht je nach Wellenlänge unterschiedlich ab. Genau den Effekt nutzt die Spectral Deflection Sensortechnologie. Durch die Nutzung von Lichtquellen, deren Wellenlänge einstellbar ist, kann das Licht in verschiedene Richtungen abgelenkt werden, so dass man ohne rotierende Teile ein gewisses Sichtfeld abdecken kann. Allerdings gibt es hier nur einen Parameter den man verstellen kann, kann also nur zum Beispiel horizontal scannen. Will man noch in die zweite Dimension, also vertical, scannen, benötigt man einen weiteren verstellbaren Parameter. Zurzeit werden spectral deflection Sensoren daher mit einem zusätzlichen mechanischen Scanner ausgerüstet, um auch die zweite Dimension abdecken zu können. Damit ist der Sensor als Ganzes dann aber natürlich nicht mehr Solid-State und wird teuer. Außerdem sind die Ansprüche an die Lichtquelle bei spectral deflection sehr hoch. Ihre Wellenlänge muss mit einer hohen Güte einstellbar sein und das ausgesandte Licht (der Puls) muss sehr schmalbandig, also ebenfalls von hoher Güte sein. Solche Lichtquellen sind in der Regel ebenfalls teuer.
- Ein ʻOptical Phased Arrayʼ funktioniert im Grunde wie eine Radar-Antenne, allerdings im optischen Bereich. Es handelt sich um ein zweidimensionales Array von Wellenleitern, wobei jeder Wellenleiter in der Lage ist, die Phase des Lichts zu verändern. Auf diese Weise ist es möglich, das sich konstruktiv überlagernde Licht am Ausgang der Wellenleiter so zu interferieren, dass der emittierte Impuls, in einen bestimmten Winkel gelenkt wird. Dieser Scanmechanismus ist elegant, aber seine Umsetzung in Hardware ist sehr anspruchsvoll. Es wird wahrscheinlich noch ein paar Jahre dauern, bis wir Sensoren mit Optical Phased Arrays und genügender Reichweite auf der Straße sehen können.
Preisreduzierung durch Großserienfertigung schon bald erwartet
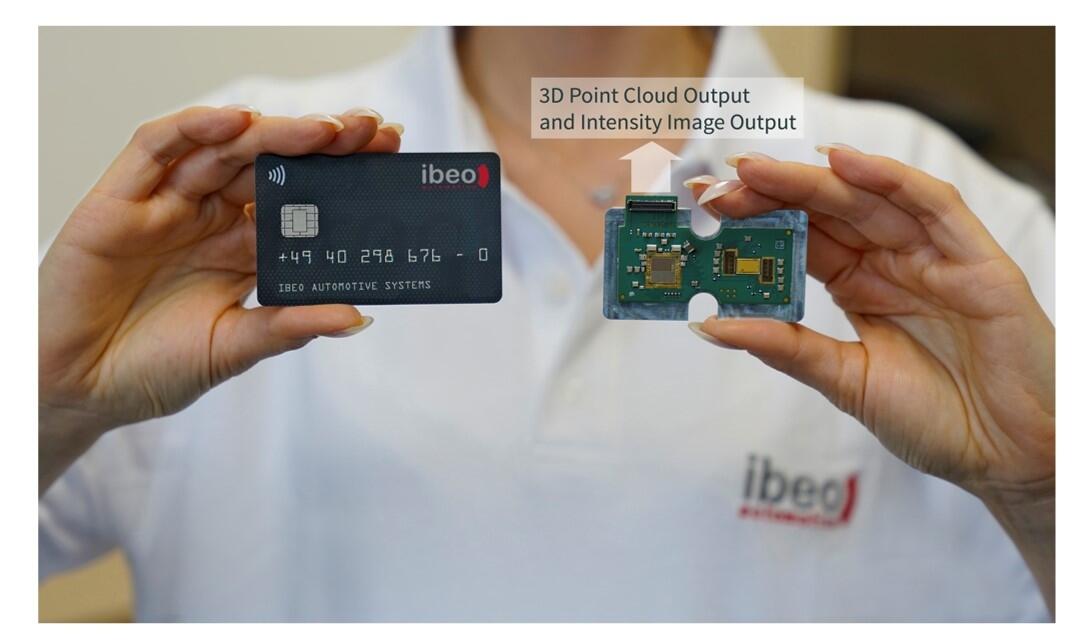
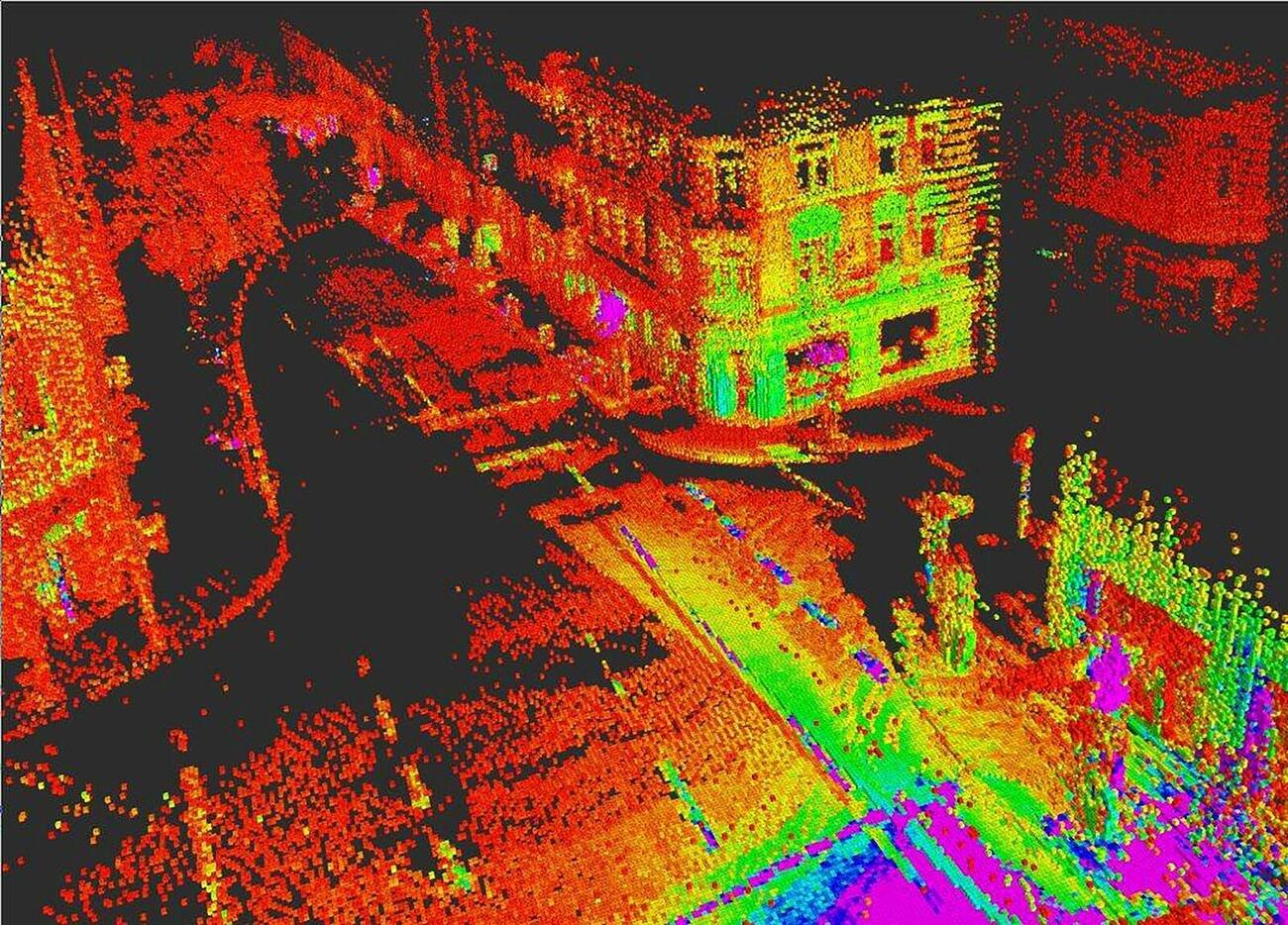
Wir bei Ibeo haben uns für die Version der „Sequential Flash Lidar“ entschieden – einer verbesserten Version der Flash-Technik: dem Ibeo Next. Hierbei geht weniger Licht verloren und die optische Leistung kann effektiver genutzt werden. Der Grund hierfür ist, dass wir mit unseren Emittern nur dorthin Licht aussenden, wo auch die Detektoren hinschauen und nicht, wie beim Flash Lidar, einfach das gesamte Sichtfeld mit Licht fluten. Wir senden das Licht gezielt dorthin, „wo es auch benötigt wird“. So entsteht ein hochaufgelöstes Bild bzw. eine 3D-Point-Cloud. Das Modul selbst ist so kompakt, dass es auf eine Kreditkarte passt.
Außerdem nutzen wir ein besonderes Messverfahren, das time-correlated single photon counting (TCSPC), welches uns ermöglicht die empfangenen Daten digital zu verarbeiten. Dadurch gewinnen wir mehr Informationen (nicht nur die Distanz, sondern beispielsweise auch bestimmte Objekteigenschaften und Wetterbedingungen) aus unseren Messungen, als das mit konventionellen Lidar Sensoren möglich ist.

Fazit: Die Kombination macht’s
Die Entwicklungen auf OEM-Seite werden gleichermaßen durch ein hohes Sicherheitsbedürfnis sowie durch Kostendruck bestimmt. Lidar-Sensoren sind heutzutage zweifellos die teuersten der drei Sensoren. Kameras und Radar erhält man im Vergleich zu Lidar zu einem Bruchteil des Preises. Sobald mit der Großserienfertigung der Lidar-Preis in den dreistelligen Bereich fallen wird, sehe ich eine wirklich konkurrenzfähige Preisentwicklung für Solid-State-Modelle. Das wirklich Spannende dabei ist, dass es hier immer noch enormes Entwicklungspotenzial gibt, in dem verschiedene gut funktionierende Systeme nebeneinander existieren können. In Kombination mit Radar und anderen Systemen werden Lidar-Systeme dann auch in der Kompakt- oder Kleinwagenklasse für ein zusätzliches Maß an Sicherheit und Komfort sorgen. Und vielleicht bald schon für erschwingliches vollautomatisiertes Fahren.
Hanno Holzhüter



