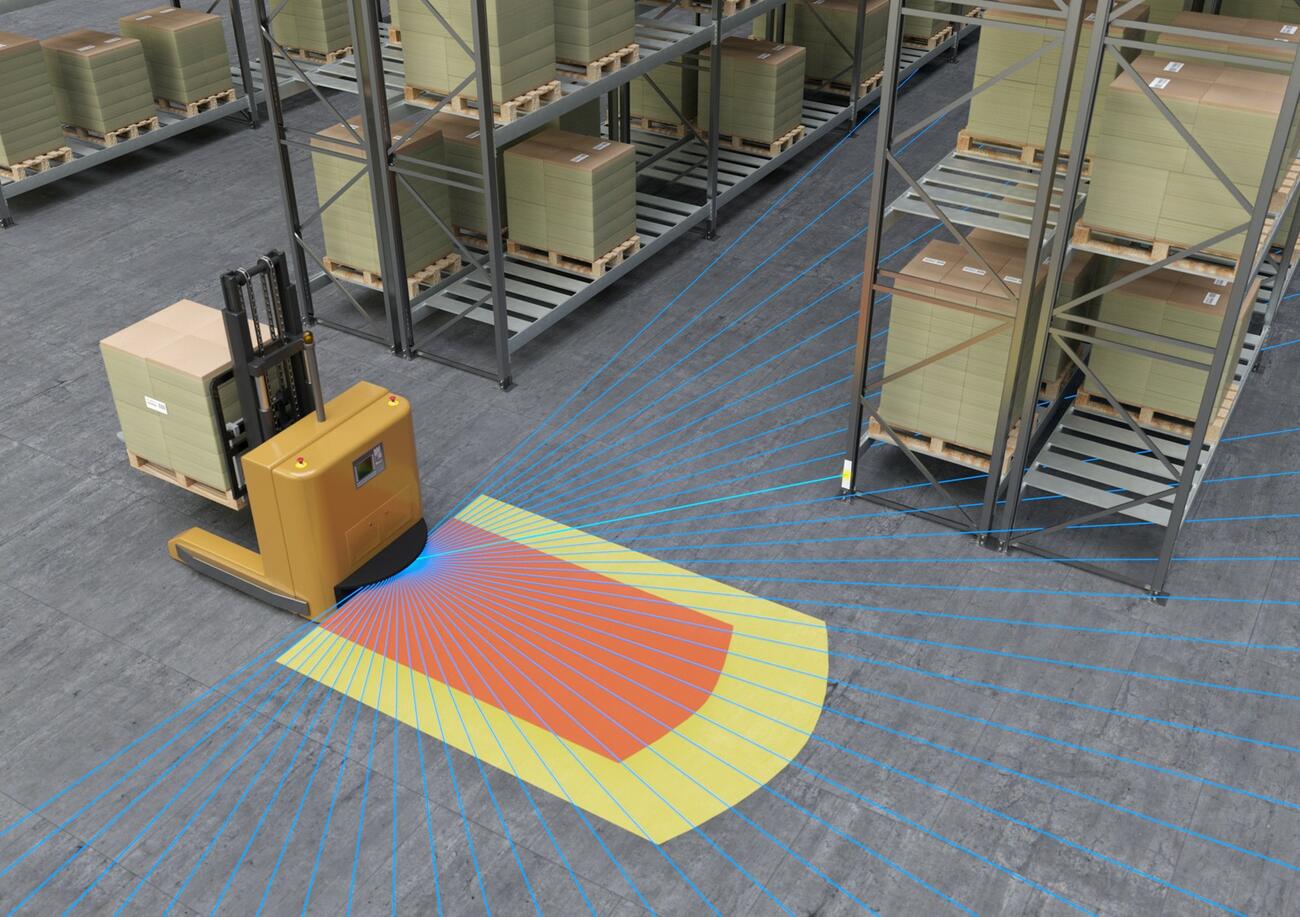
Wird das Triangulationsprinzip zur Navigation genutzt, wird ein Fahrerloses Transportsystem (FTS) häufig mit zwei unterschiedlichen Scannern ausgestattet: Einem für die Sicherheit, der Andere für die Navigation. Der neue Sicherheits-Laserscanner RSL 400 von Leuze Electronic ist eine echte Alternative, denn: er erfüllt nicht nur Safety-Aufgaben, sondern stellt darüber hinaus alle Messwerte für die FTS-Navigation nach dem Natural-Navigation-Prinzip zur Verfügung. Die Messwerte verfügen dabei über eine besonders hohe Winkelauflösung und Genauigkeit. Dies ist wichtig für eine präzise Positionsbestimmung des FTS. So wird nur noch ein einziger Scanner für Safety UND die Navigation benötigt. Die Messwertausgabe des RSL 400 ist für Navigationssoftware optimiert, die nach dem Prinzip der Natural Navigation mit SLAM (Simultaneous Localization and Mapping) arbeitet.. Mit jeder, 40 Millisekunden dauernden Umdrehung seiner Ablenkeinheit sendet der Sicherheits-Laserscanner 2700 Lichtimpulse aus. Diese werden an Hindernissen in alle Richtungen gestreut. Einen Teil des gestreuten Lichts empfängt der Scanner wieder und berechnet daraus die Entfernung zum Hindernis. In der Navigationssoftware ist ein Abbild des jeweiligen Raumes inklusive aller festen Begrenzungen ähnlich einer Landkarte hinterlegt. Durch den Abgleich der Messwerte mit dieser Landkarte lässt sich berechnen, wo sich das FTS gerade befindet. Dieses Konzept wird als Natural Navigation bezeichnet. Je detaillierter und exakter die Messwerte eines Scanners sind, desto präziser kann das FTS navigiert werden. Mit einer Winkelauflösung von 0,1° macht der RSL 400 im gesamten Messbereich bis 50 m eine differenzierte Erfassung der Umgebung möglich. Erreicht wird dies durch einen besonders schmalen Laserspot, welcher seine senkrechte Form über den gesamten Winkelbereich beibehält. Auch Fehlmessungen, wie sie beispielsweise an Kanten entstehen können, werden dadurch reduziert.
Hindernisse fest im Blick
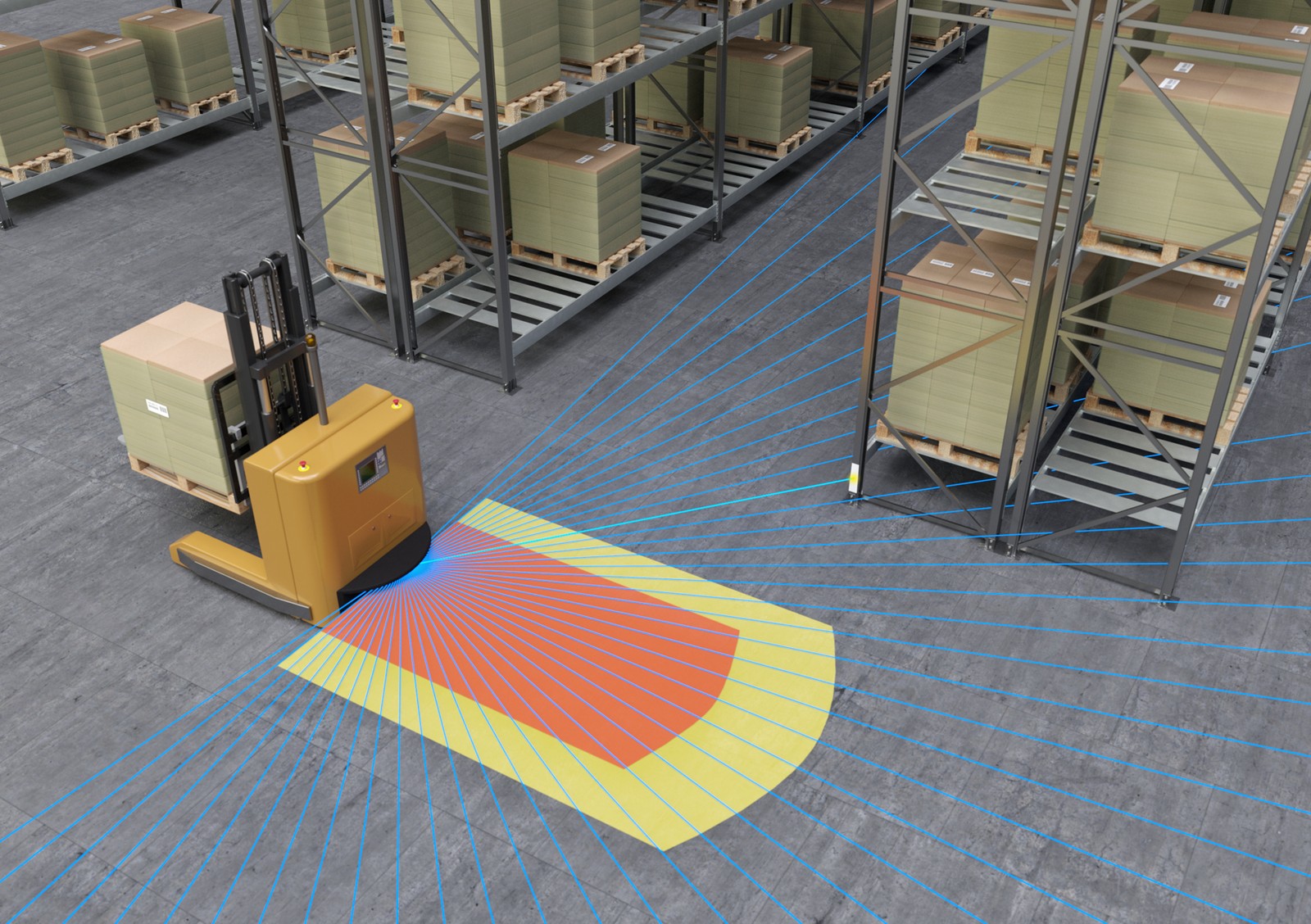
Wie weit ist das Hindernis entfernt? Neben der Winkelauflösung kommt es auf die Distanzwerte an. Diese weisen mit einem typischen Fehler von 30 mm eine hohe Genauigkeit auf. Darüber hinaus werden die Werte nicht durch den Reflexionsgrad des Objekts beeinflusst, und zwar unabhängig davon, ob es sich um einen Reflektor oder eine schwarze Wand handelt. Die zusätzliche Ausgabe des empfangenen Signalstärkewerts je Strahl ermöglicht die eigenständige Erkennung von Reflektoren durch die Navigationssoftware. Treffen Strahlen auf einen Reflektor, heben sich die Werte deutlich von einer beliebigen Umgebung ab. Das macht eine einfache und zuverlässige Erkennung möglich. Trotz Navigation kommt die Sicherheit nicht zu kurz: der kompakte Sicherheits- Laserscanner RSL 400 bietet bis zu 100 umschaltbare Paare aus Schutz- und Warnfeldern. Dank dieser hohen Zahl lassen sich Schutzfelder sehr vielfältig an die jeweiligen Bewegungs- und Beladezustände sowie die Geschwindigkeit eines Fahrzeugs anpassen. Im 4-Felder-Modus mit 50 umschaltbaren Felder-Sets überwacht das Gerät sogar bis zu vier Schutzfelder gleichzeitig. Dies ermöglicht eine sichere Reduzierung der Geschwindigkeit von FTS. Darüber hinaus bietet der RSL 400 mit einen Scan-Winkel von 270° die Möglichkeit, den Front- und den Seitenbereich eines FTS gleichzeitig abzudecken - sozusagen „über Eck“. Kombiniert mit einer maximalen Reichweite von 8,25 m lassen sich dank dieser Merkmale selbst große FTS durch den Einsatz von lediglich zwei RSL 400 komplett absichern. Den Sicherheits-Laserscanner gibt es in verschiedenen Varianten. Insgesamt umfasst das Portfolio 9 Funktionsvarianten - 3 davon mit Datenausgabe für FTS-Navigation. Alle Varianten sind in den vier Reichweiten 3,0, 4,5, 6,25 sowie 8,25 m verfügbar. Zusätzlich stehen Modelle mit Profisafe/Profinet-Schnittstelle zur Verfügung. Vor allem bei der Verwendung vieler Schutzfeldkonfigurationen ermöglicht dies eine deutlich vereinfachte Integration der Geräte.
Mehr von Leuze finden Sie hier.